- Jak skonfigurować EtherNet/IP w falownikach serii CFP2000 w trybie prędkościowym?
1. Ustawienia po stronie falownika CFP2000
1.1. Ustawienie parametrów komunikacji
Aby móc prawidłowo nawiązać komunikację i wysterować falownik należy ustawić następujące parametry:
00-20 = 8 (zadawanie częstotliwości z karty komunikacyjnej Ethernet/IP)
00-21 = 5 (zadawanie komendy RUN/STOP z karty komunikacyjnej Ethernet/IP)
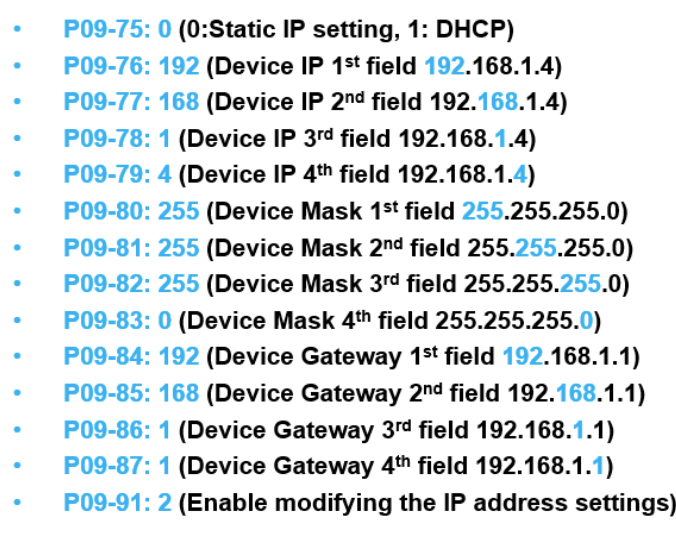
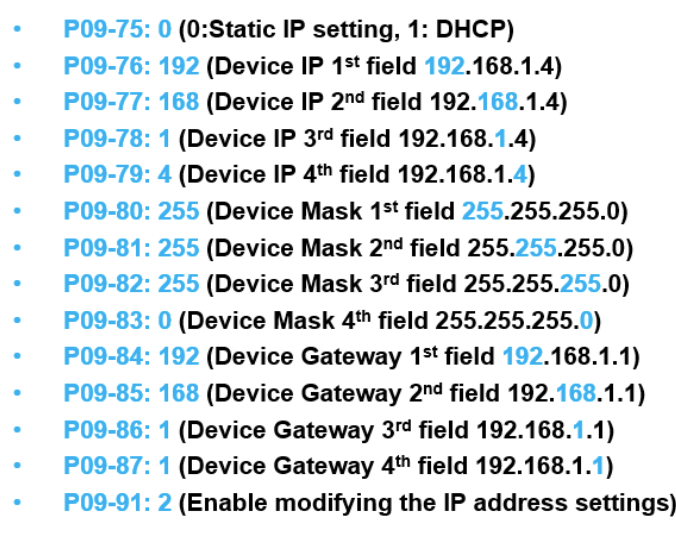
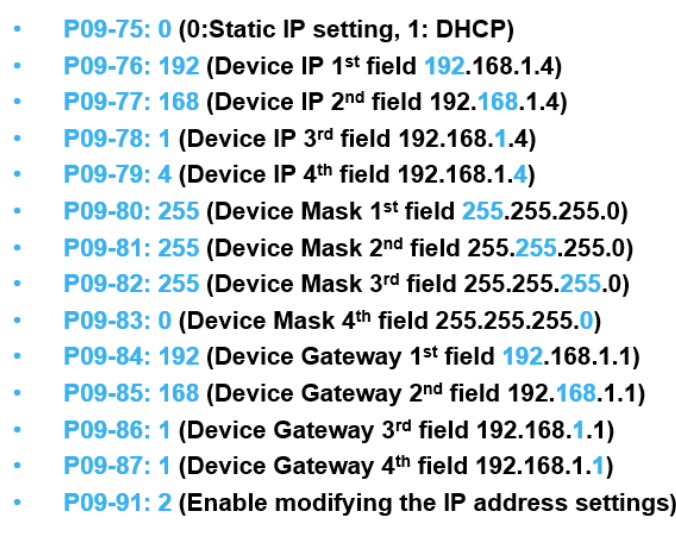
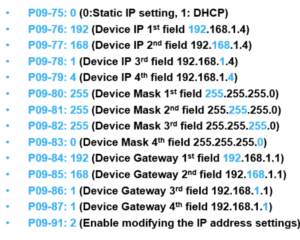
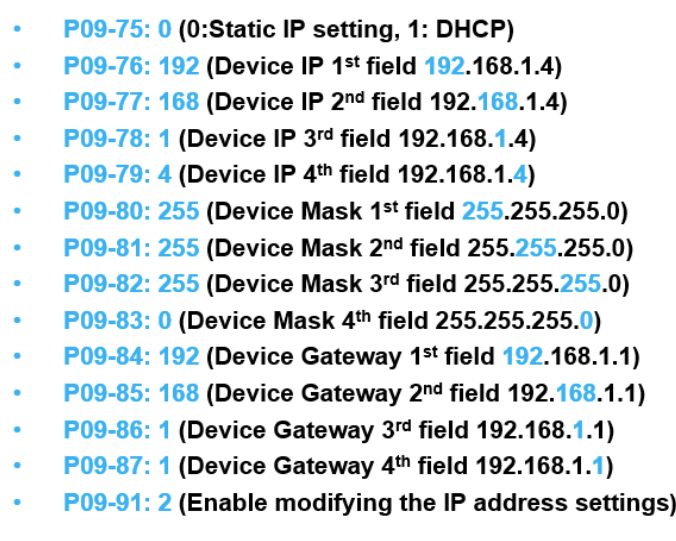
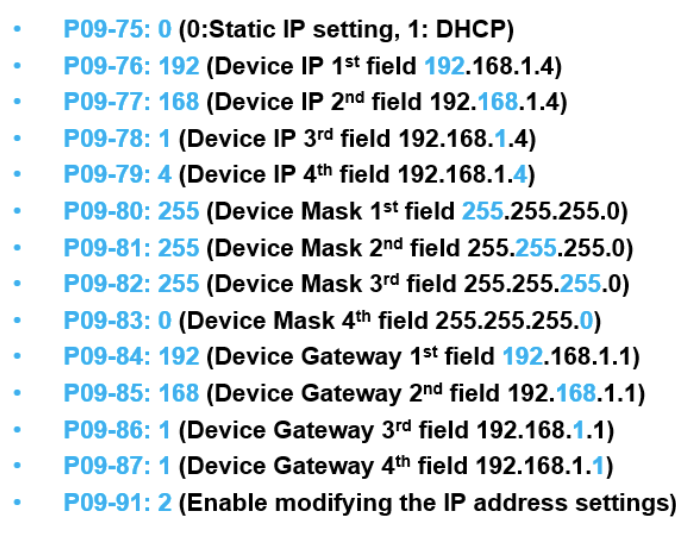
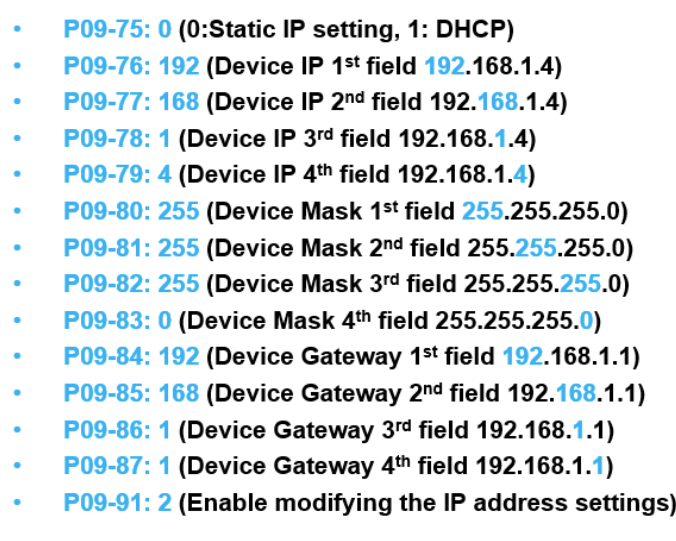
09-30 = 1 (wykorzystanie do komunikacji adresów 6xxx) lub 0 (wykorzystanie do komunikacji adresów 2xxx)1.2. Ustawienie adresu IP karty CMC-EIP01
2. Ustawienia po stronie sterownika serii AS
2.1. HWCONFIG
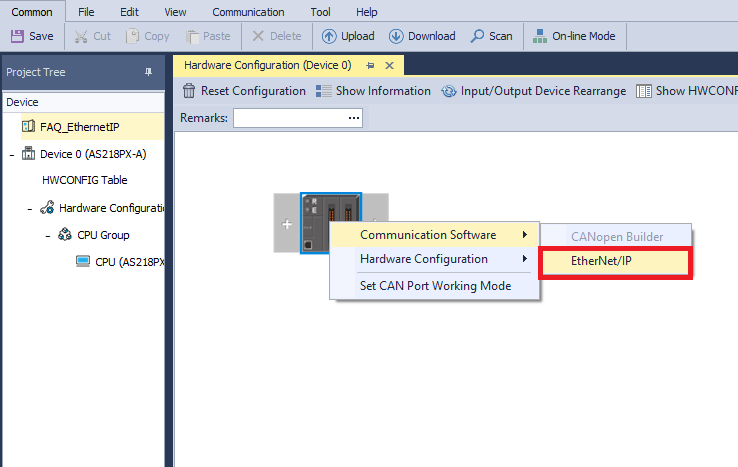
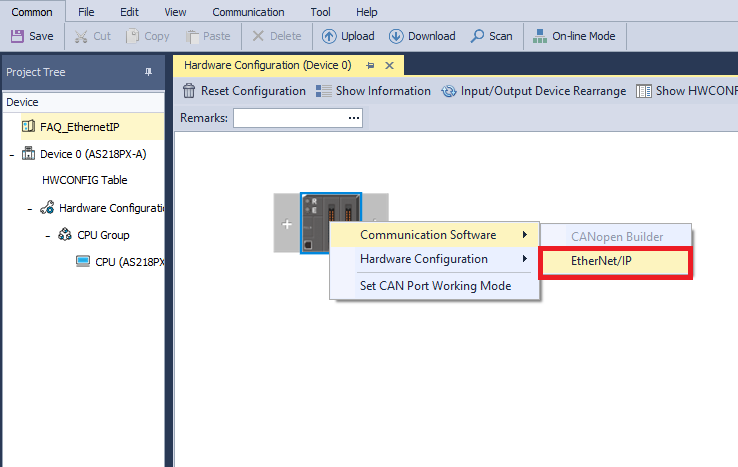
Po otwarciu projektu w ISPSoft trzeba otworzyć HWConfig, aby dodać falownik do sieci EtherNet/IP.
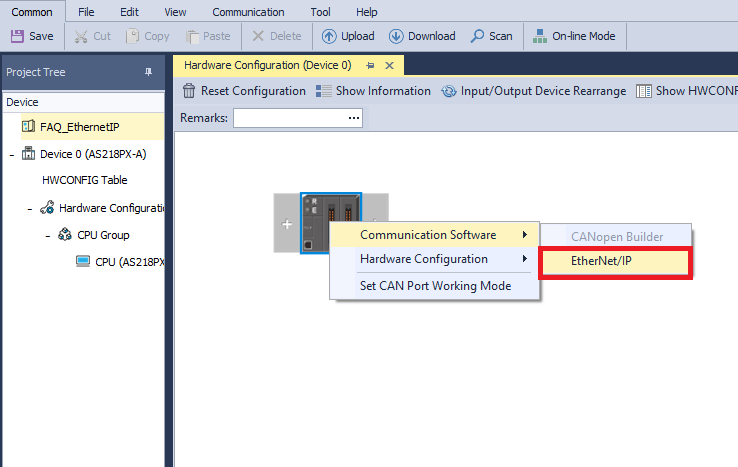
Należy kliknąć PPM na sterownik -> [Communication Software] -> [EtherNet/IP], żeby otworzyć podgląd sieci EtherNet/IP
2.2. Dodanie urządzenia do sieci Ethernet/IP
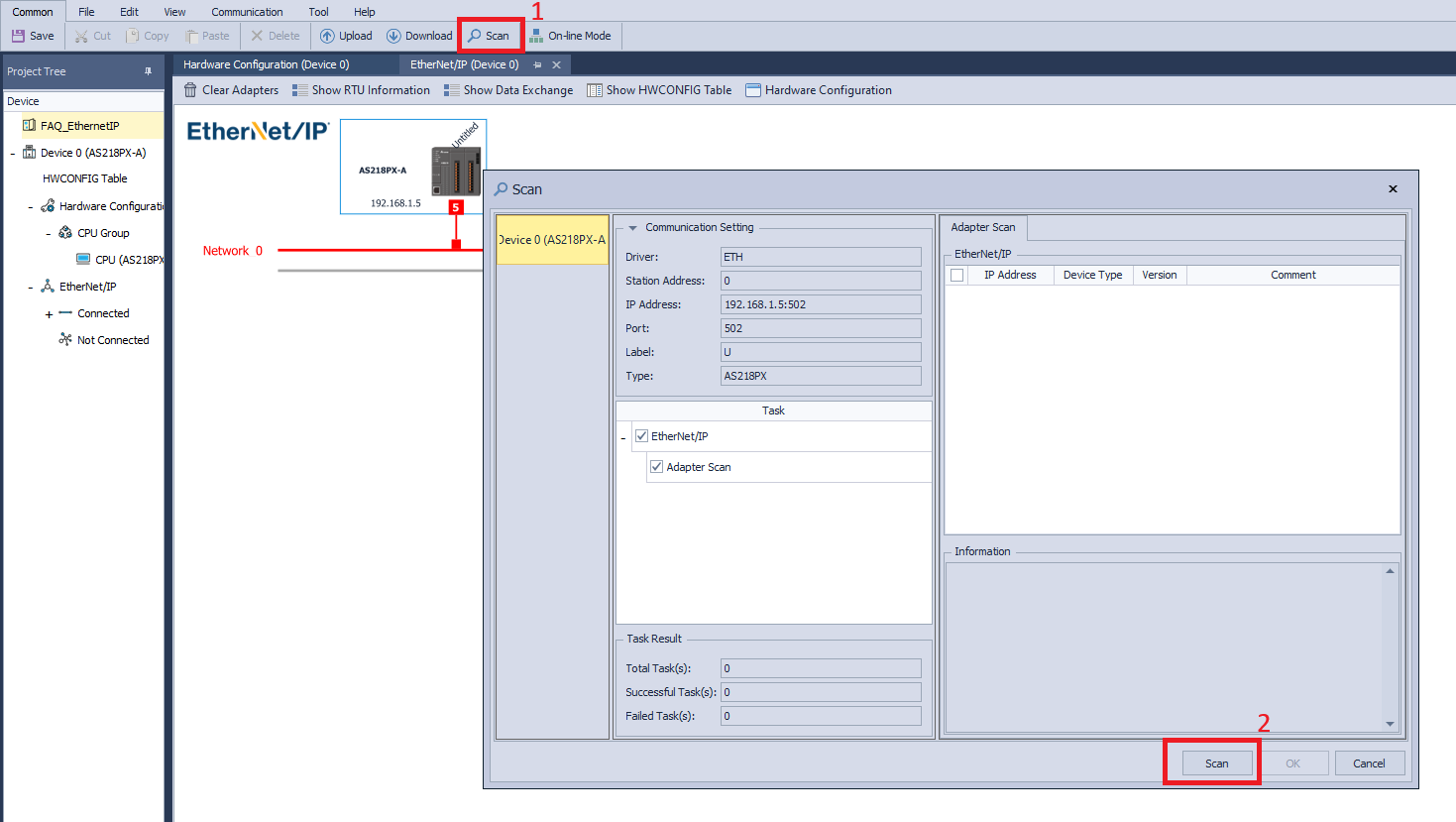
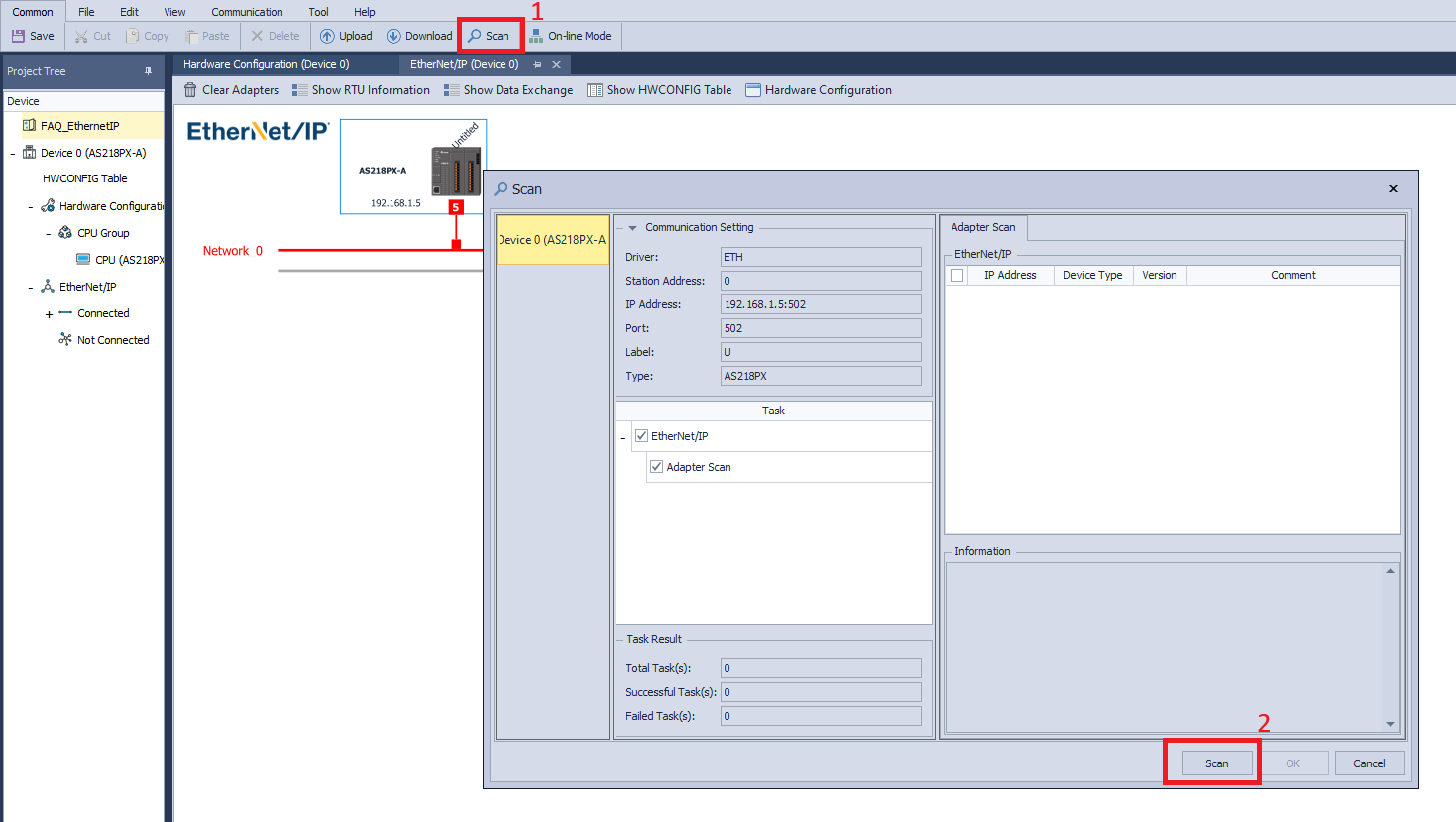
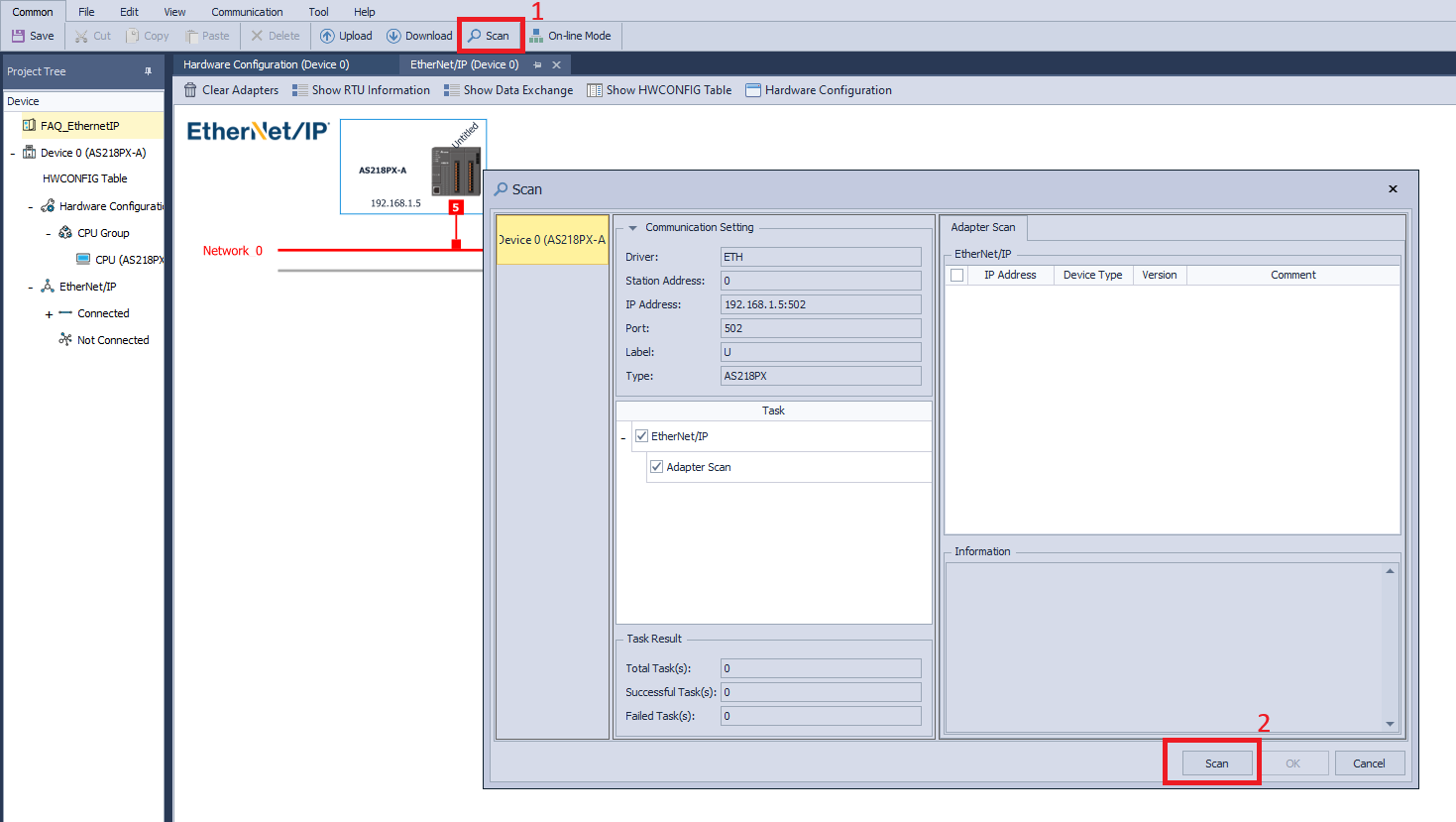
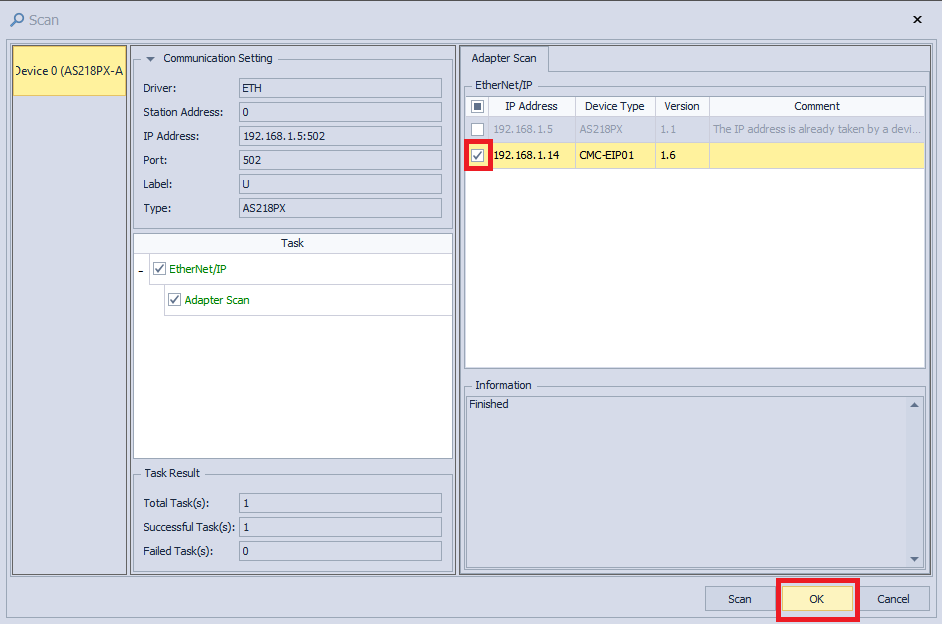
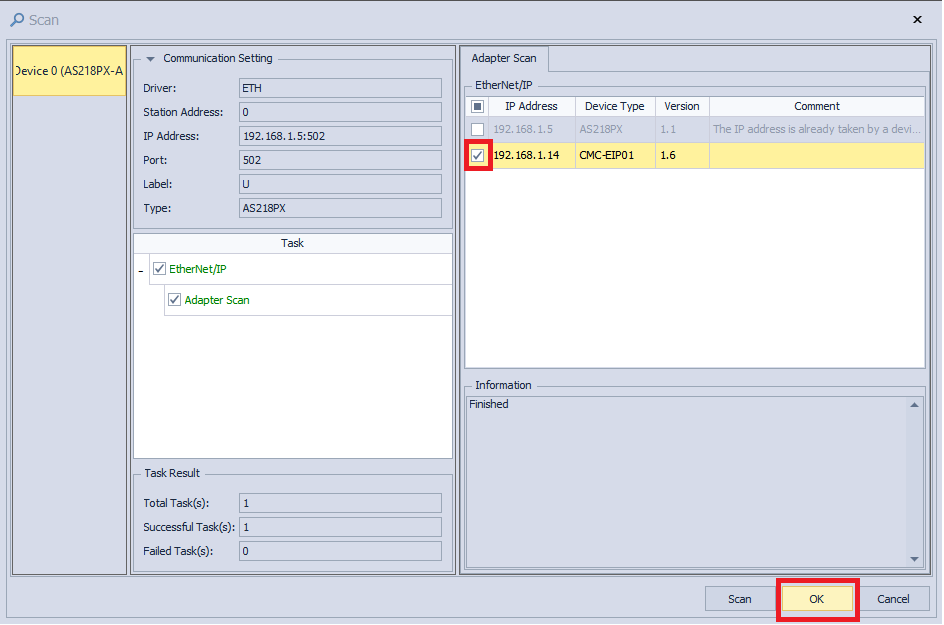
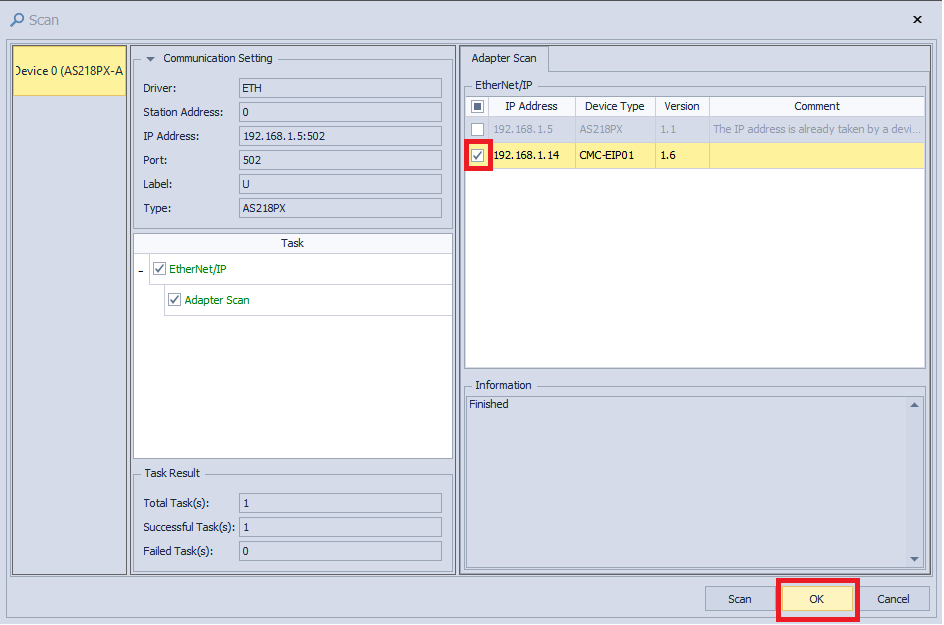
W celu dodania urządzenia do sieci należy wybrać opcję Scan z zakładki Common, a następnie po otwarciu okna kliknąć przycisk Scan.
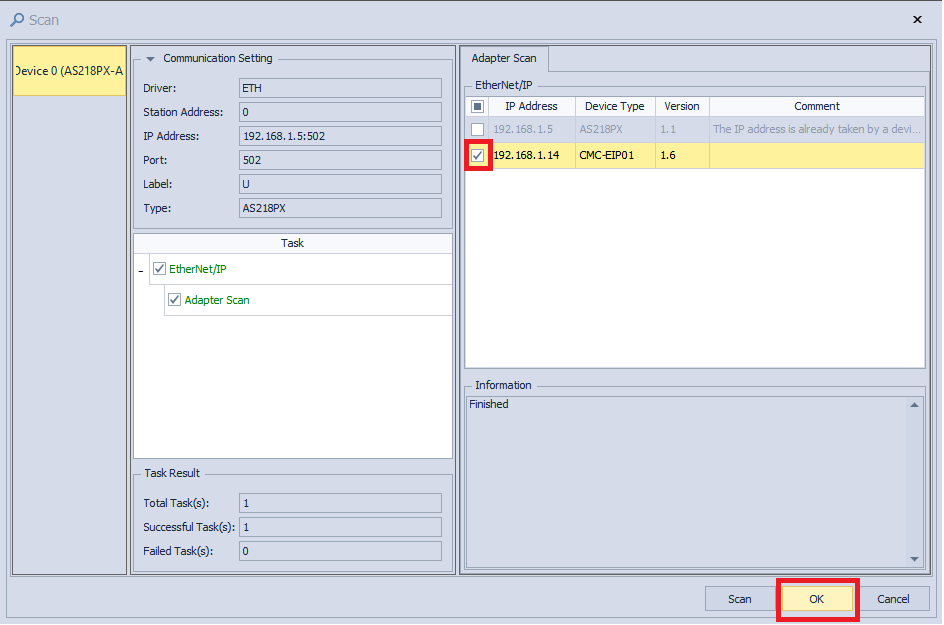
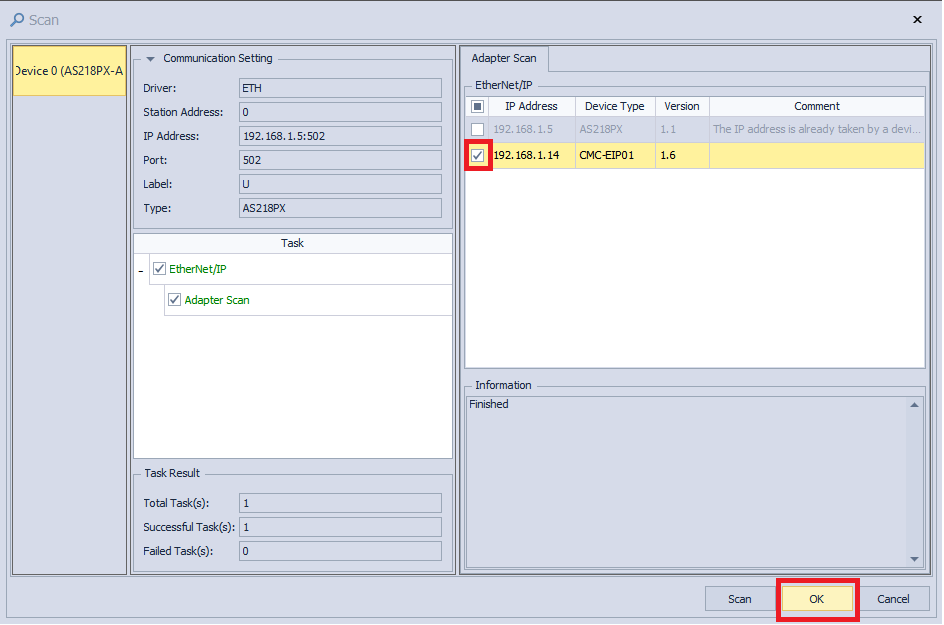
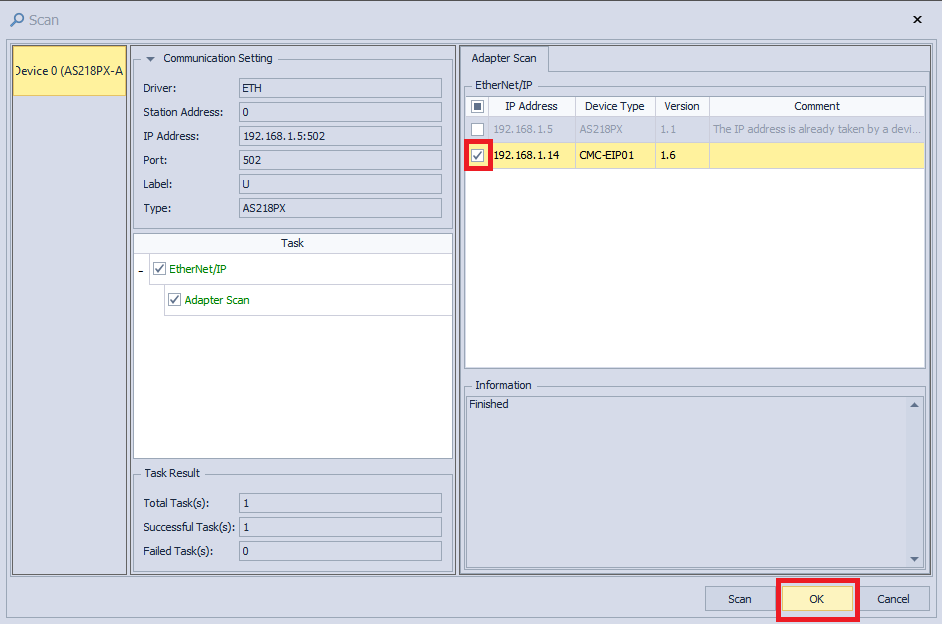
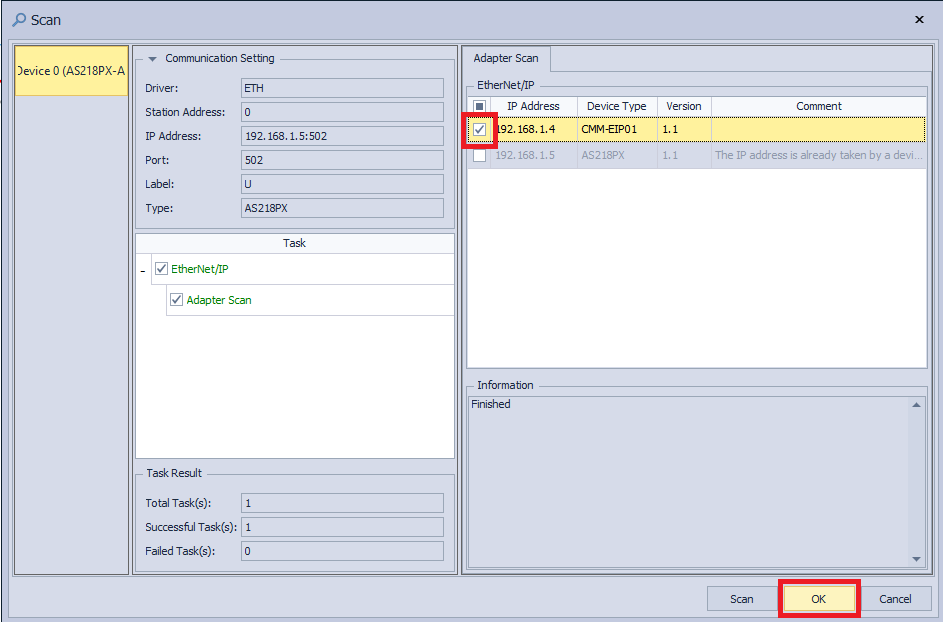
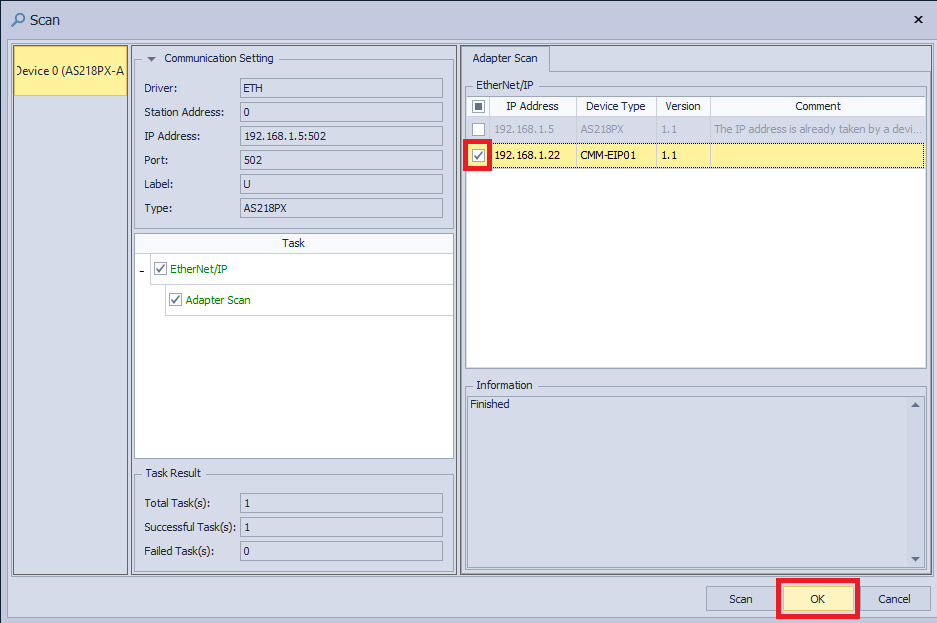
Po przeskanowaniu w zakładce Adapter Scan pojawią się urządzenia podłączone do sieci. Należy wybrać kartę komunikacyjną falownika CMC-EIP01 i kliknąć OK.
2.3. Konfiguracja wymiany danych
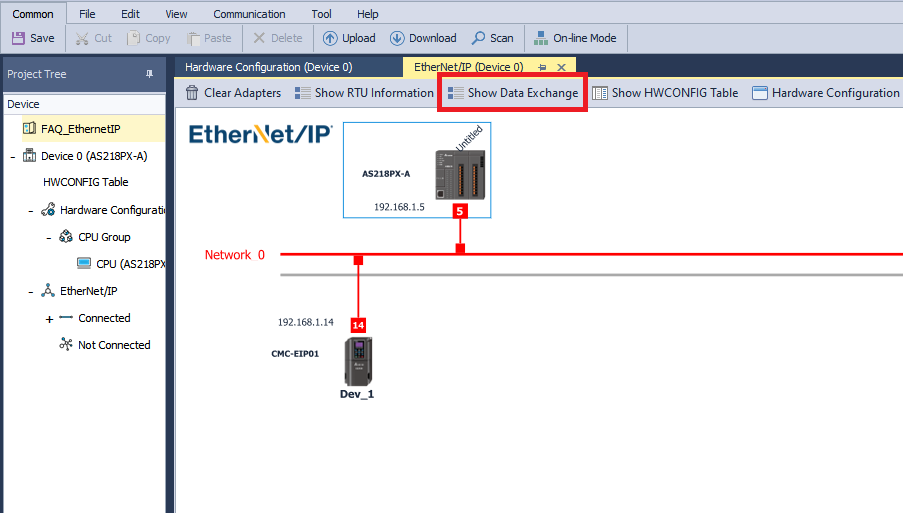
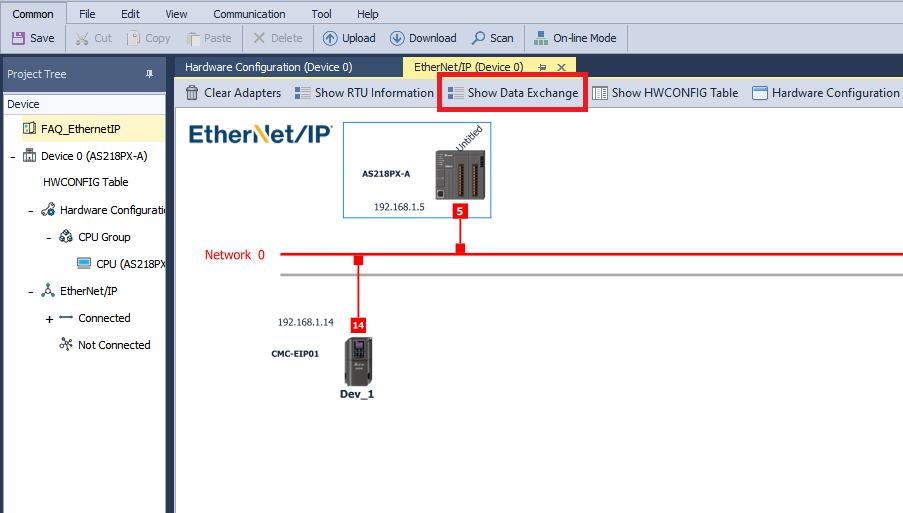
Kolejnym krokiem jest połączenie falownika z magistralą sieci Ethernet/IP oraz skonfigurowanie wymiany danych między falownikiem a sterownikiem PLC. Aby to zrobić, trzeba przejść do zakładki Show Data Exchange.
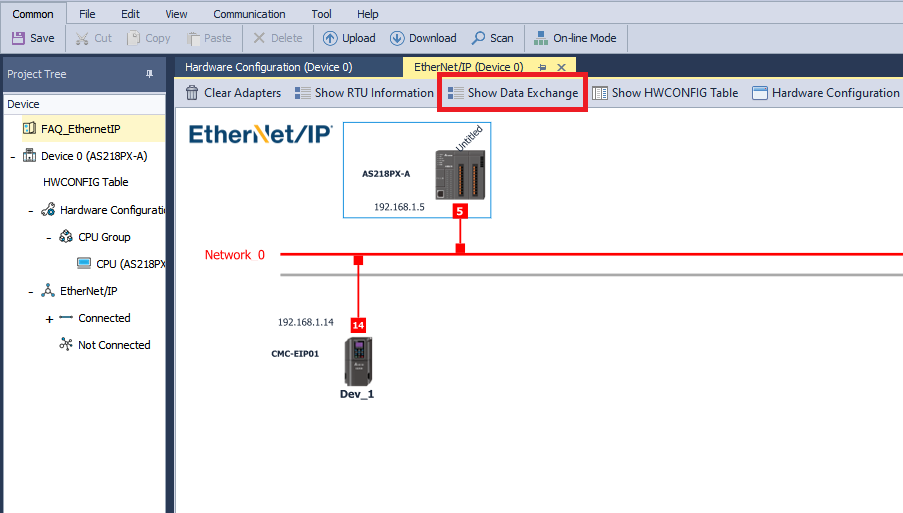
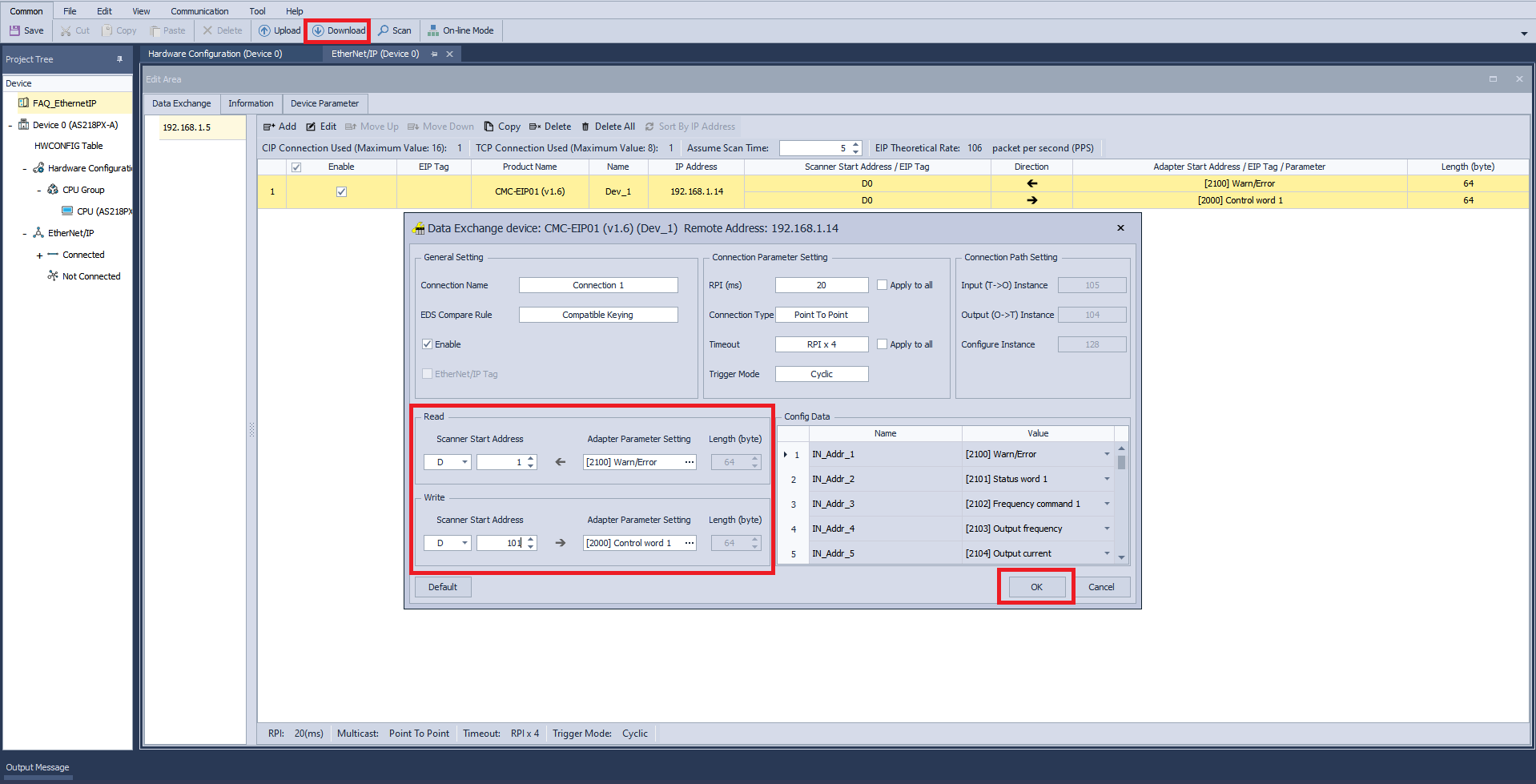
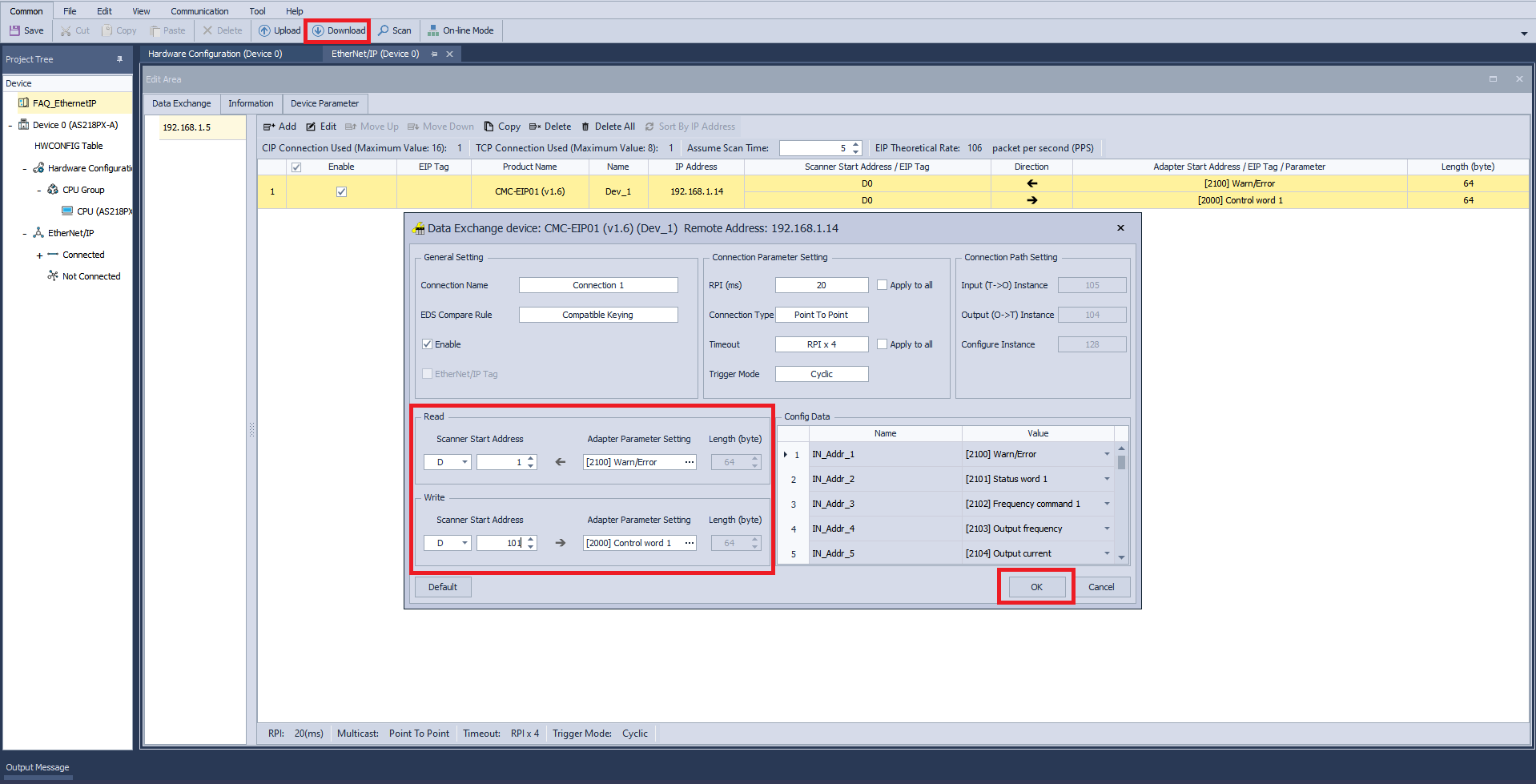
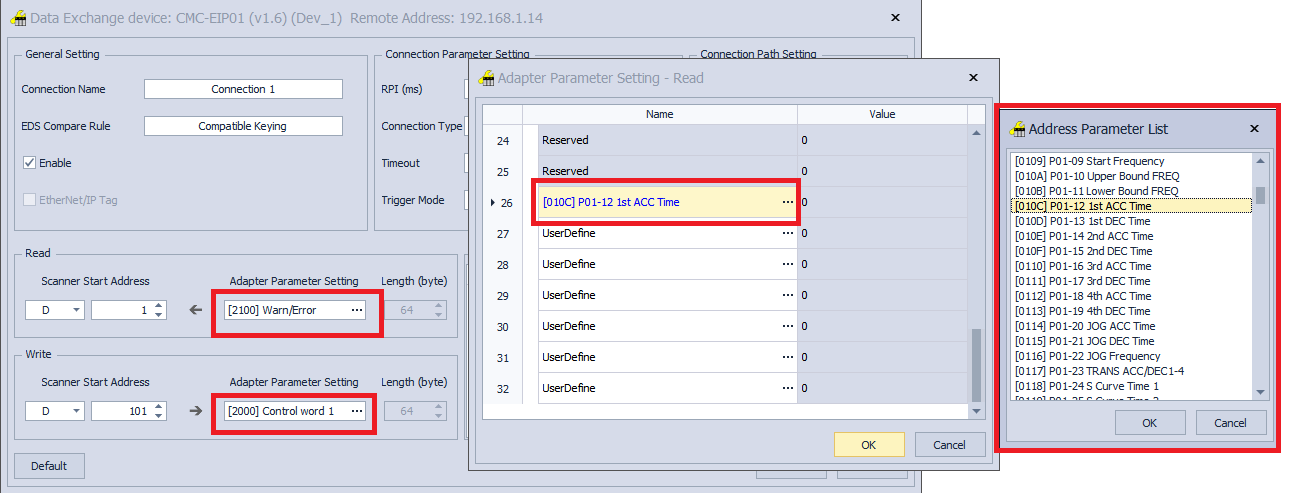
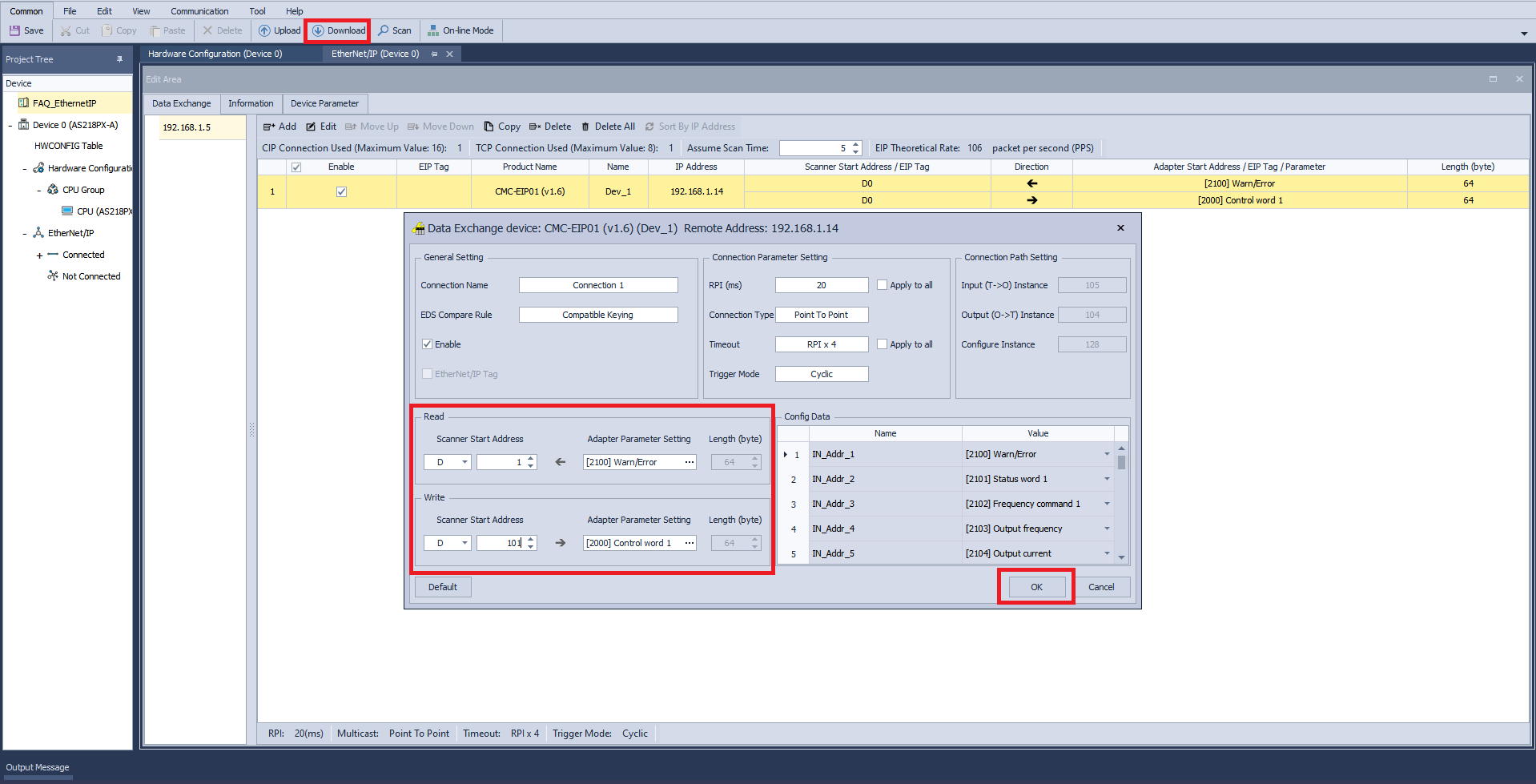
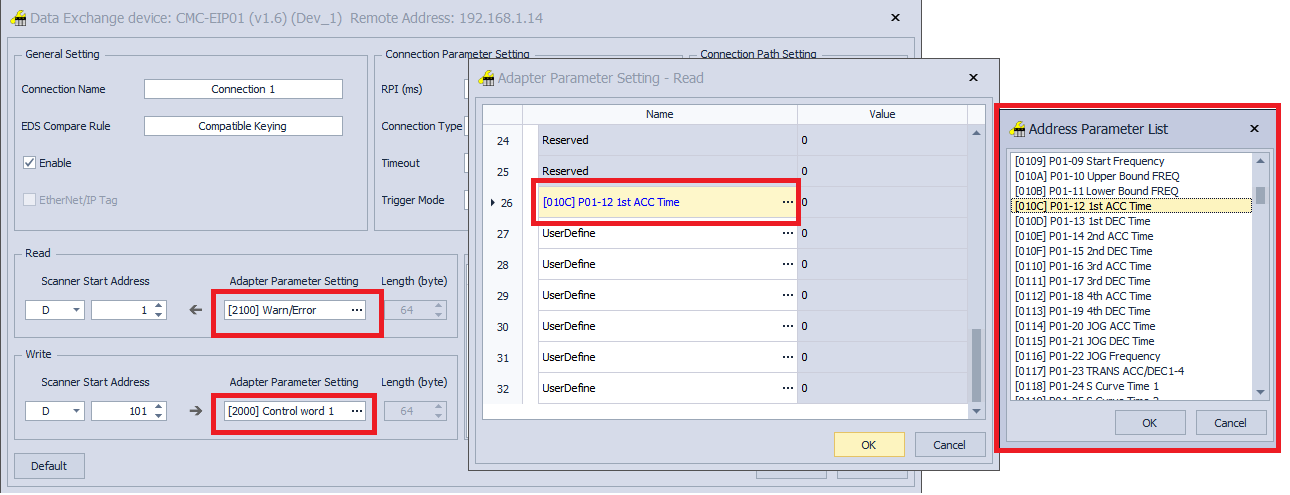
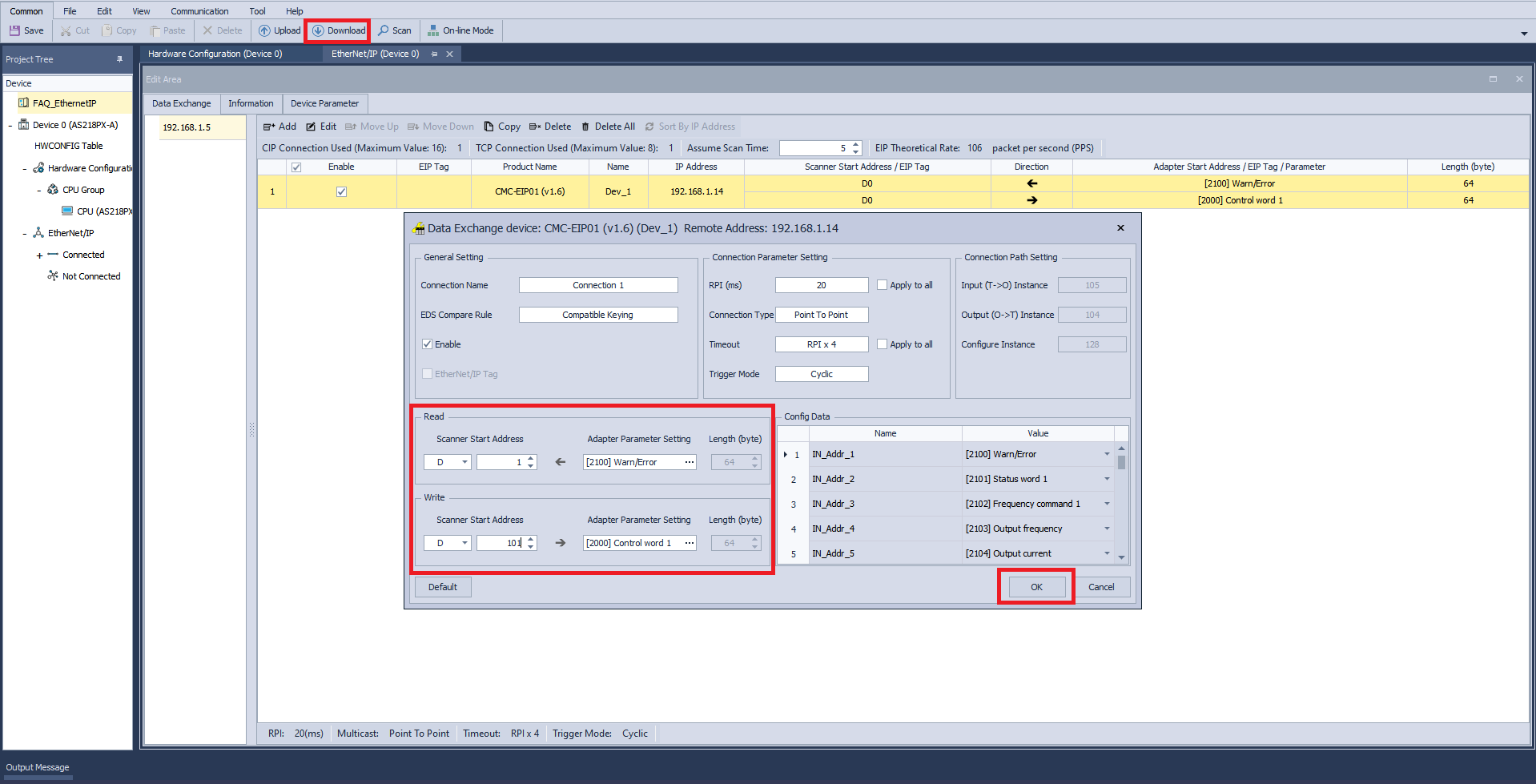
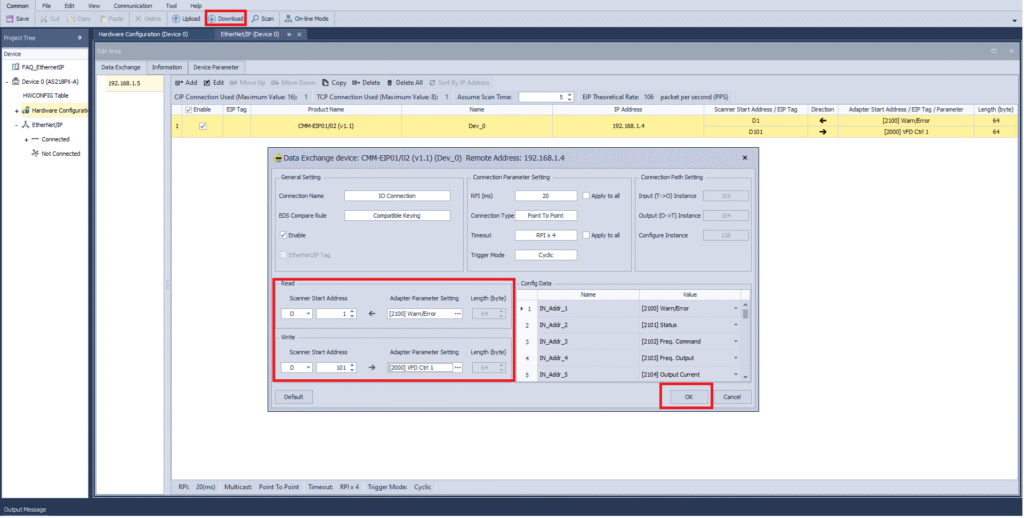
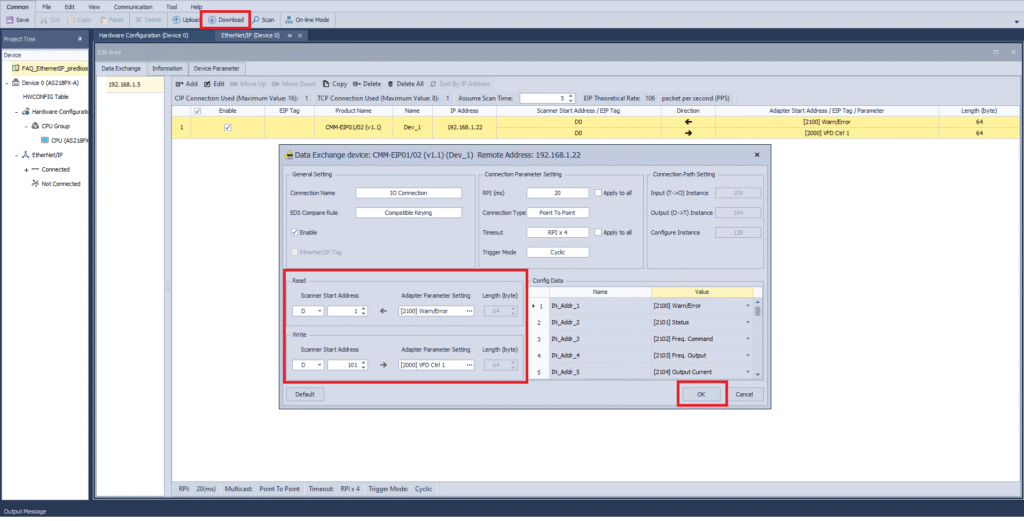
Po dodaniu falownika do sieci, automatycznie generowana jest domyślna wymiana danych. Poprzez podwójne kliknięcie na nią, można ją zmodyfikować. W otwartym oknie wybiera się adresy falownika, które będą odczytywane i zapisywane, oraz rejestry sterownika, które będą za nie odpowiadać.
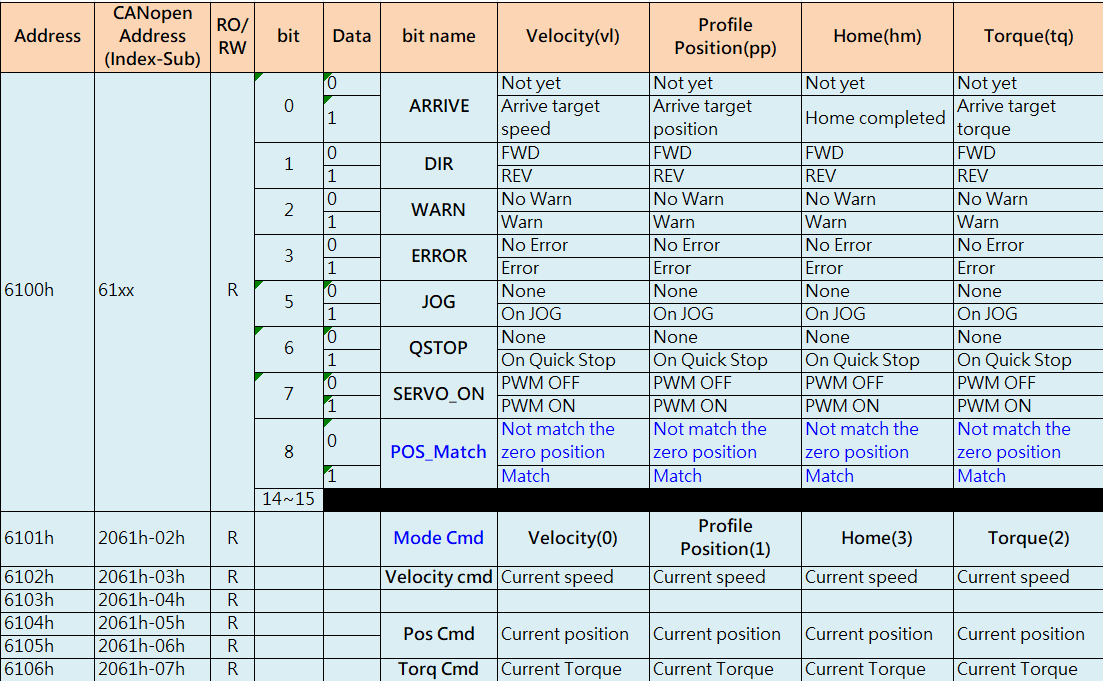
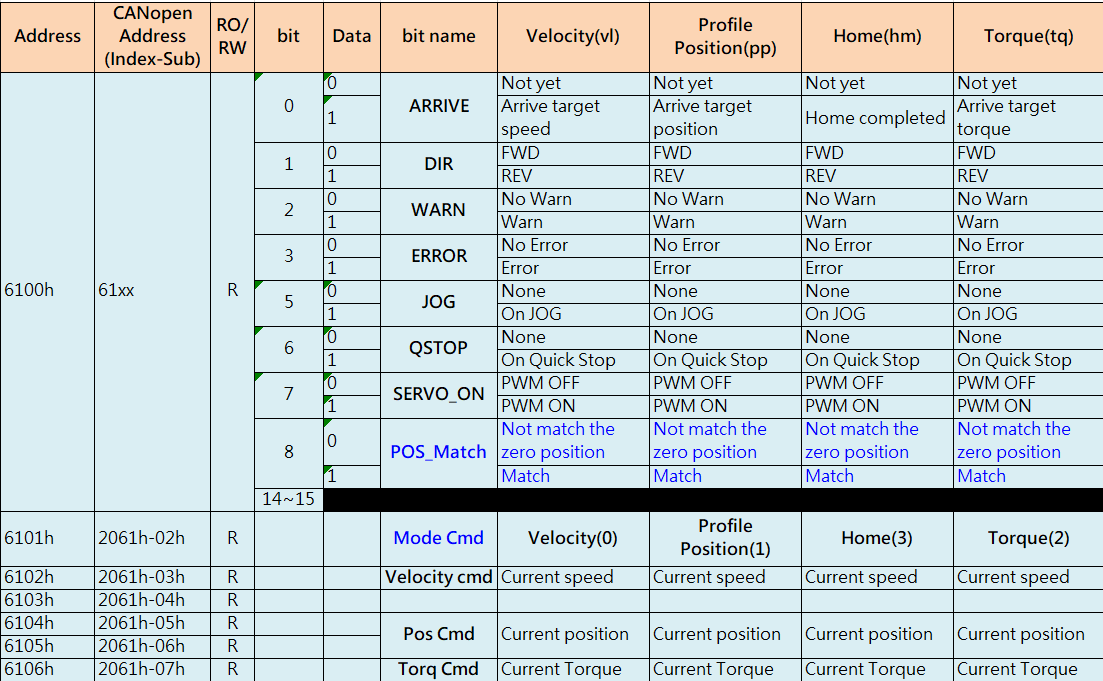
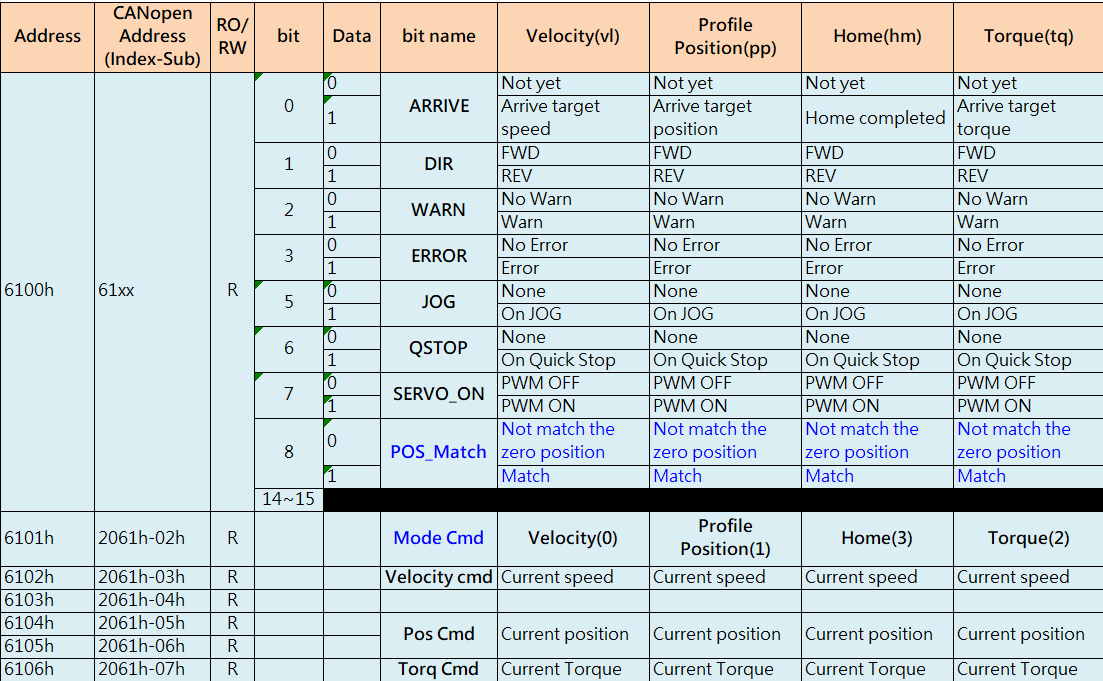
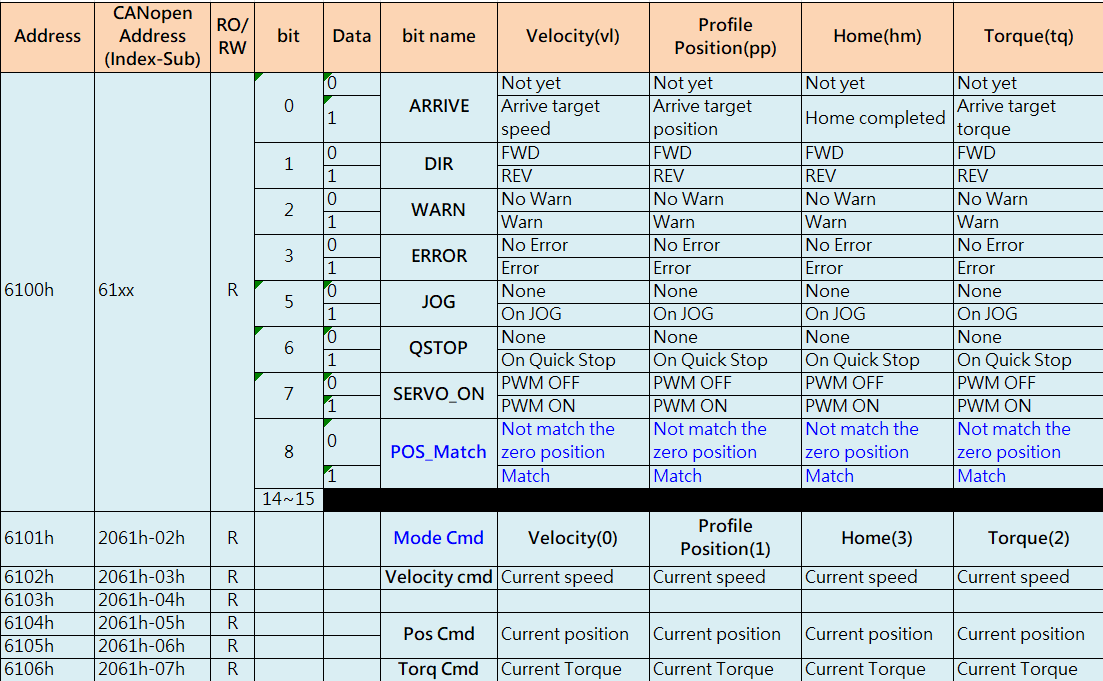
Adresy rejestrów wraz z ich opisami można znaleźć w dokumentacji falownika. Należy zwrócić uwagę, że do sterowania falownikiem służy Control Word (adres 6000). Na końcu artykułu (w rozdziale 4) przedstawiono tabelę, która przedstawia działanie poszczególnych bitów control worda i znaczenie bitów status worda (adres 6100). Komendę częstotliwości ustawia się z wykorzystaniem Frequency limit (adres 6007).
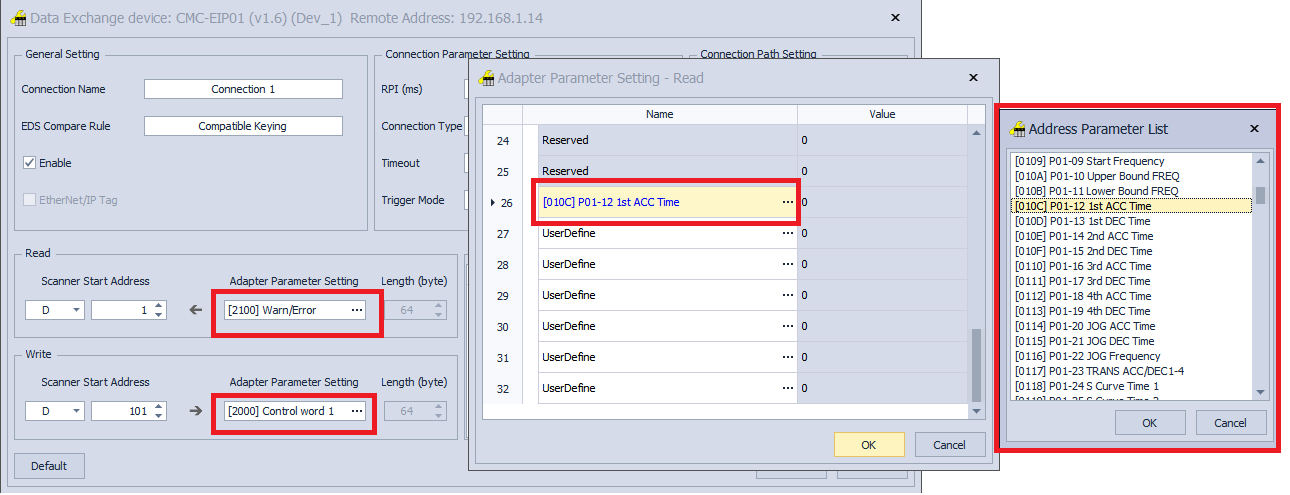
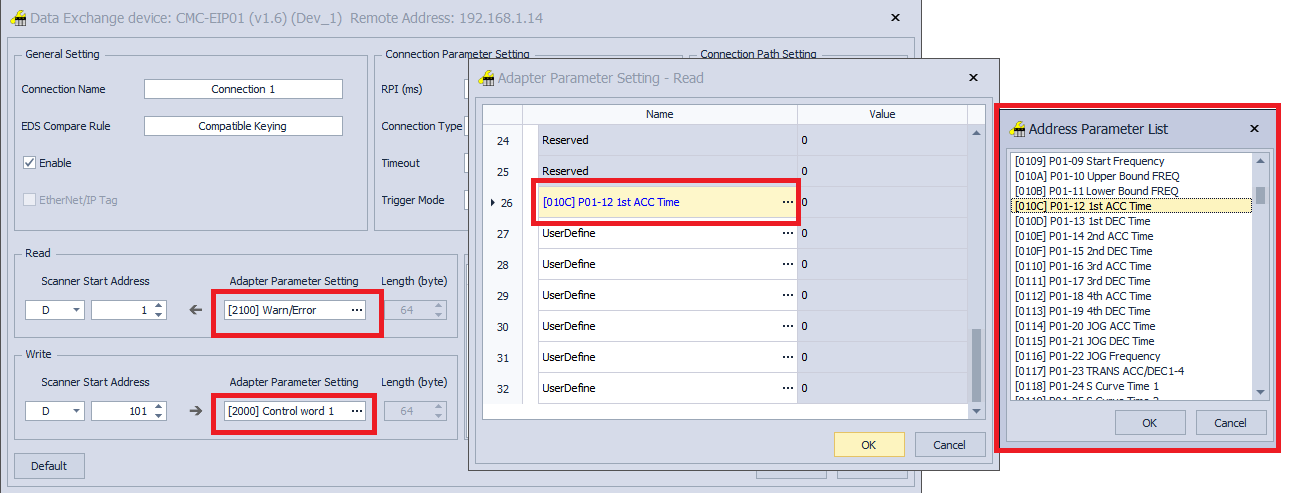
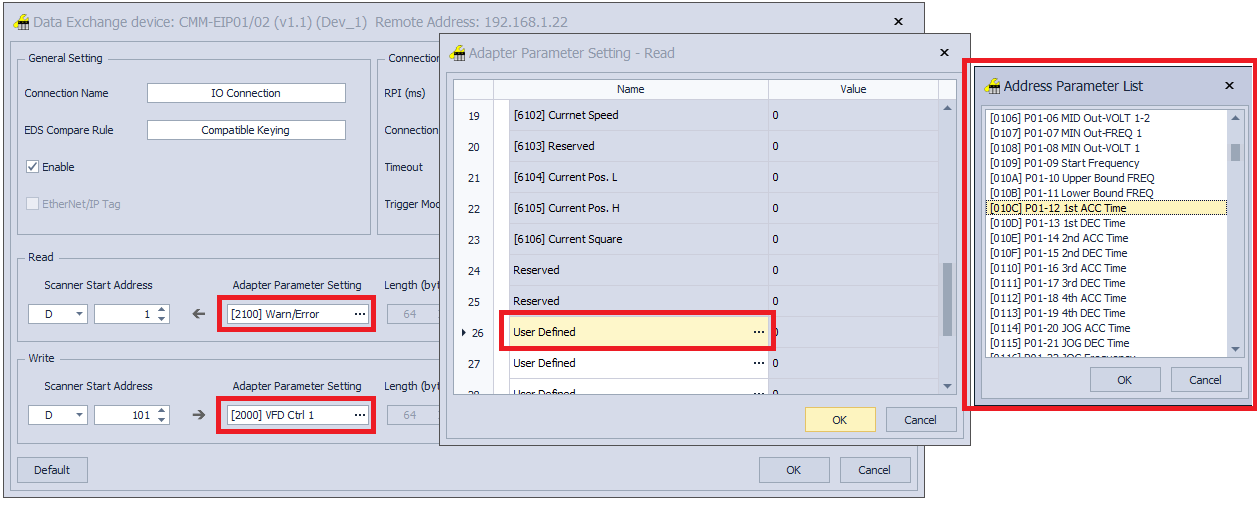
Istnieje możliwość odnoszenia się do parametrów falownika w sposób komunikacyjny. Należy kliknąć na pole pod Adapter Parameter Setting, następnie otworzy się okno, gdzie z listy można wybrać odpowiedni parametr.
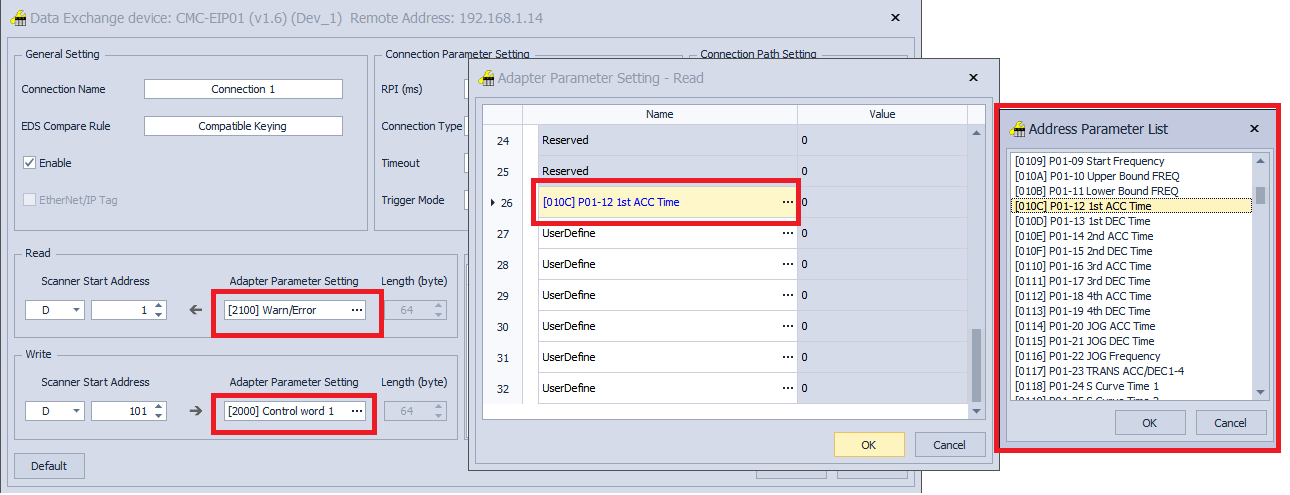
UWAGA 1. Odnosząc się komunikacyjnie do parametrów falownika trzeba zabezpieczyć jego pamięć EEPROM!
UWAGA 2. Jeżeli zabezpieczymy EEPROM, to wszystkie ustawiane parametry na falowniku ulotnią się po resecie zasilania.
UWAGA 3. Korzystając z zapisu tylko do rejestrów 60xx nie ma potrzeby zabezpieczenia EEPROM’u.Po skonfigurowaniu tabeli wymiany danych należy ją zatwierdzić przyciskiem OK, a następnie przeprowadzić wgrywanie ustawień HWCONFIG do PLC, przez kliknięcie Download. Po wykonaniu tych kroków można zamknąć HWCONFIG.
3. Przykładowy program w ISPSoft
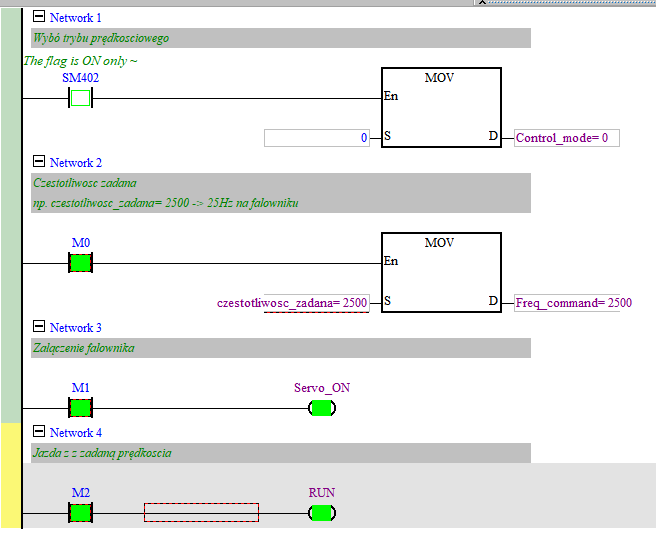
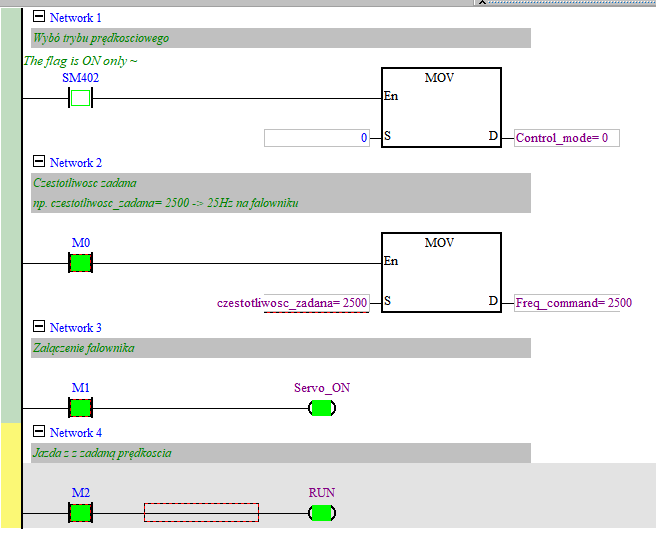
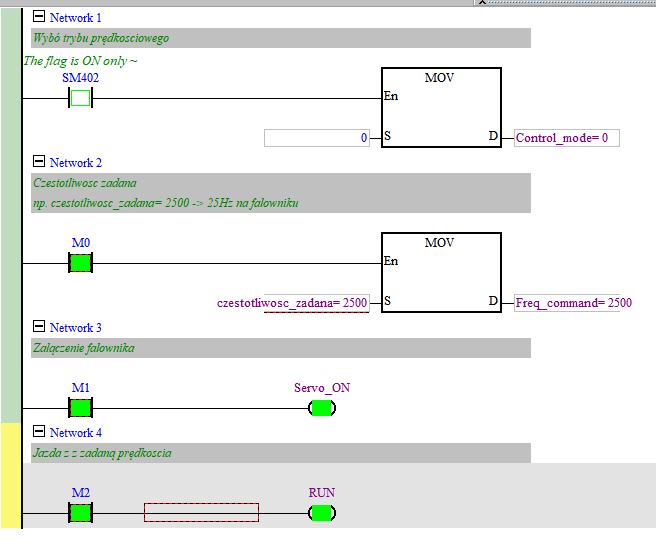
Przykład programu, który umożliwia sterowanie falownikiem, oraz zmianę częstotliwości zadanej.
Do zmiennej Control_mode należy przypisać wartość 0, czyli ustawienie trybu prędkościowego. Następnie zadawana jest częstotliwość zmienną częstotliwość_zadana. Jednostką częstotliwości jest 0.01 Hz.
W pozostałej części programu jest wywołanie komend załączenia obwodu mocy falownika za pomocą flagi M1. Wykonywania ruchu z zadaną prędkością załączane jest flagą M2.

4. Tabele Control word i Status word
Tabela Control Word:
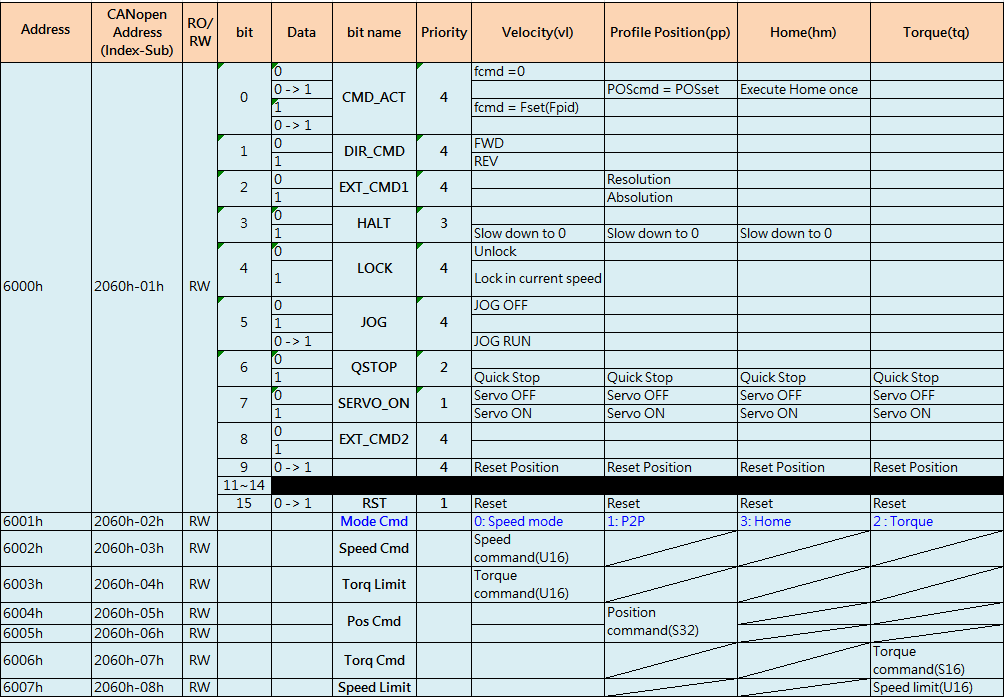
Tabela Status Word
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 11 lutego 2025
- Jak skonfigurować EtherNet/IP w falownikach serii C2000 w trybie prędkościowym?
1. Ustawienia po stronie falownika C2000
1.1. Ustawienie parametrów komunikacji
Aby móc prawidłowo nawiązać komunikację i wysterować falownik należy ustawić następujące parametry:
00-20 = 8 (zadawanie częstotliwości z karty komunikacyjnej Ethernet/IP)
00-21 = 5 (zadawanie komendy RUN/STOP z karty komunikacyjnej Ethernet/IP)
09-30 = 1 (wykorzystanie do komunikacji adresów 6xxx) lub 0 (wykorzystanie do komunikacji adresów 2xxx)1.2. Ustawienie adresu IP karty CMC-EIP01 np.:
2. Ustawienia po stronie sterownika serii AS
2.1. HWCONFIG
Po otwarciu projektu w ISPSoft trzeba otworzyć HWConfig, aby dodać falownik do sieci EtherNet/IP.
Należy kliknąć PPM na sterownik -> [Communication Software] -> [EtherNet/IP], żeby otworzyć podgląd sieci EtherNet/IP
2.2. Dodanie urządzenia do sieci Ethernet/IP
W celu dodania urządzenia do sieci należy wybrać opcję Scan z zakładki Common, a następnie po otwarciu okna kliknąć przycisk Scan
Po przeskanowaniu w zakładce Adapter Scan pojawią się urządzenia podłączone do sieci. Należy wybrać kartę komunikacyjną falownika CMC-EIP01 i kliknąć OK.
2.3. Konfiguracja wymiany danych
Kolejnym krokiem jest połączenie falownika z magistralą sieci Ethernet/IP oraz skonfigurowanie wymiany danych między falownikiem a sterownikiem PLC. Aby to zrobić, trzeba przejść do zakładki Show Data Exchange.
Po dodaniu falownika do sieci, automatycznie generowana jest domyślna wymiana danych. Poprzez podwójne kliknięcie na nią, można ją zmodyfikować. W otwartym oknie wybiera się adresy falownika, które będą odczytywane i zapisywane, oraz rejestry sterownika, które będą za nie odpowiadać.
Adresy rejestrów wraz z ich opisami można znaleźć w dokumentacji falownika. Należy zwrócić uwagę, że do sterowaniem falownikiem służy Control Word (adres 6000). Na końcu artykułu (w rozdziale 4) przedstawiono tabelę, która przedstawia działanie poszczególnych bitów control worda i znaczenie bitów status worda (adres 6100). Komendę częstotliwości ustawia się z wykorzystaniem Frequency limit (adres 6007).
Istnieje możliwość odnoszenia się do parametrów falownika w sposób komunikacyjny. Należy kliknąć na pole pod Adapter Parameter Setting, następnie otworzy się okno, gdzie z listy można wybrać odpowiedni parametr.
UWAGA 1. Odnosząc się komunikacyjnie do parametrów falownika trzeba zabezpieczyć jego pamięć EEPROM!
UWAGA 2. Jeżeli zabezpieczymy EEPROM, to wszystkie ustawiane parametry na falowniku ulotnią się po resecie zasilania.
UWAGA 3. Korzystając z zapisu tylko do rejestrów 60xx nie ma potrzeby zabezpieczenia EEPROM’u.Po skonfigurowaniu tabeli wymiany danych należy ją zatwierdzić przyciskiem OK, a następnie przeprowadzić wgrywanie ustawień HWCONFIG do PLC, przez kliknięcie Download. Po wykonaniu tych kroków można zamknąć HWCONFIG.
3. Przykładowy program w ISPSoft
Przykład programu, który umożliwia sterowanie falownikiem, oraz zmianę częstotliwości zadanej.
Do zmiennej Control_mode należy przypisać wartość 0, czyli ustawienie trybu prędkościowego. Następnie jest zadawana jest częstotliwość zmienną częstotliwość_zadana. Jednostką częstotliwości jest 0.01 Hz.
W pozostałej części programu jest wywołanie komend załączenia obwodu mocy falownika za pomocą flagi M1. Wykonywania ruchu z zadaną prędkością załączane jest flagą M2.

4. Tabele Control word i Status word
Tabela Control Word:
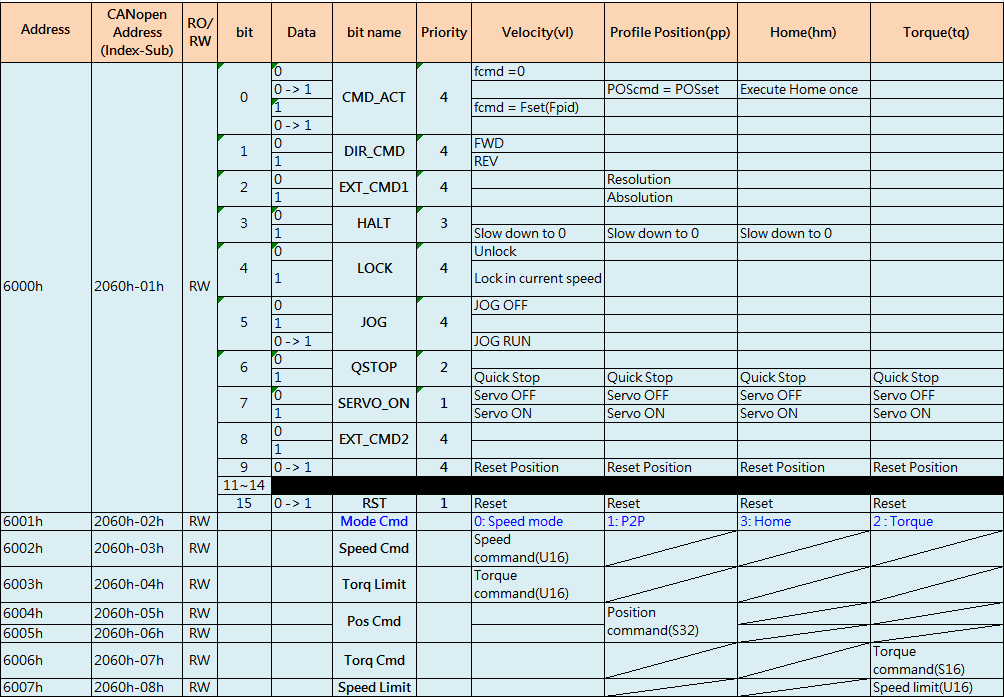
Tabela Status Word:
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 11 lutego 2025
- Jak skonfigurować EtherNet/IP w falownikach serii CP2000 w trybie prędkościowym?
1. Ustawienia po stronie falownika CP2000
1.1. Ustawienie parametrów komunikacji
Aby móc prawidłowo nawiązać komunikację i wysterować falownik należy ustawić następujące parametry:
00-20 = 8 (zadawanie częstotliwości z karty komunikacyjnej Ethernet/IP)
00-21 = 5 (zadawanie komendy RUN/STOP z karty komunikacyjnej Ethernet/IP)
09-30 = 1 (wykorzystanie do komunikacji adresów 6xxx) lub 0 (wykorzystanie do komunikacji adresów 2xxx)1.2. Ustawienie adresu IP karty CMC-EIP01
2. Ustawienia po stronie sterownika serii AS
2.1. HWCONFIG
Po otwarciu projektu w ISPSoft trzeba otworzyć HWConfig, aby dodać falownik do sieci EtherNet/IP.
Należy kliknąć PPM na sterownik -> [Communication Software] -> [EtherNet/IP], żeby otworzyć podgląd sieci EtherNet/IP
2.2. Dodanie urządzenia do sieci Ethernet/IP
W celu dodania urządzenia do sieci należy wybrać opcję Scan z zakładki Common, a następnie po otwarciu okna kliknąć przycisk Scan.
Po przeskanowaniu w zakładce Adapter Scan pojawią się urządzenia podłączone do sieci. Należy wybrać kartę komunikacyjną falownika CMC-EIP01 i kliknąć OK.
2.3. Konfiguracja wymiany danych
Kolejnym krokiem jest połączenie falownika z magistralą sieci Ethernet/IP oraz skonfigurowanie wymiany danych między falownikiem a sterownikiem PLC. Aby to zrobić, trzeba przejść do zakładki Show Data Exchange.
Po dodaniu falownika do sieci, automatycznie generowana jest domyślna wymiana danych. Poprzez podwójne kliknięcie na nią, można ją zmodyfikować. W otwartym oknie wybiera się adresy falownika, które będą odczytywane i zapisywane, oraz rejestry sterownika, które będą za nie odpowiadać.
Adresy rejestrów wraz z ich opisami można znaleźć w dokumentacji falownika. Należy zwrócić uwagę, że do sterowania falownikiem służy Control Word (adres 6000). Na końcu artykułu (w rozdziale 4) przedstawiono tabelę, która przedstawia działanie poszczególnych bitów control worda i znaczenie bitów status worda (adres 6100). Komendę częstotliwości ustawia się z wykorzystaniem Frequency limit (adres 6007).
Istnieje możliwość odnoszenia się do parametrów falownika w sposób komunikacyjny. Należy kliknąć na pole pod Adapter Parameter Setting, następnie otworzy się okno, gdzie z listy można wybrać odpowiedni parametr.
UWAGA 1. Odnosząc się komunikacyjnie do parametrów falownika trzeba zabezpieczyć jego pamięć EEPROM!
UWAGA 2. Jeżeli zabezpieczymy EEPROM, to wszystkie ustawiane parametry na falowniku ulotnią się po resecie zasilania.
UWAGA 3. Korzystając z zapisu tylko do rejestrów 60xx nie ma potrzeby zabezpieczenia EEPROM’u.Po skonfigurowaniu tabeli wymiany danych należy ją zatwierdzić przyciskiem OK, a następnie przeprowadzić wgrywanie ustawień HWCONFIG do PLC, przez kliknięcie Download. Po wykonaniu tych kroków można zamknąć HWCONFIG.
3. Przykładowy program w ISPSoft
Przykład programu, który umożliwia sterowanie falownikiem, oraz zmianę częstotliwości zadanej.
Przykład programu, który umożliwia sterowanie falownikiem, oraz zmianę częstotliwości zadanej.
Do zmiennej Control_mode należy przypisać wartość 0, czyli ustawienie trybu prędkościowego. Następnie zadawana jest częstotliwość zmienną częstotliwość_zadana. Jednostką częstotliwości jest 0.01 Hz.
W pozostałej części programu jest wywołanie komend załączenia obwodu mocy falownika za pomocą flagi M1. Wykonywania ruchu z zadaną prędkością załączane jest flagą M2.


4. Tabele Control word i Status word
Tabela Control Word:
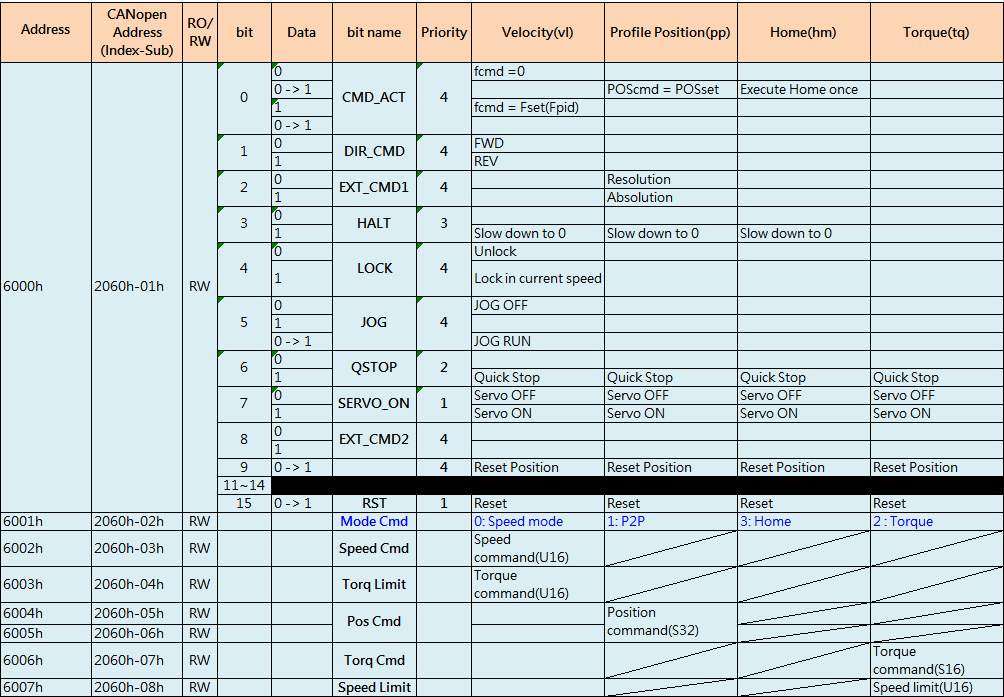
Tabela Status Word:

Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 11 lutego 2025
- Jak skonfigurować EtherNet/IP w falownikach serii C2000+ w trybie pozycyjnym?
1. Ustawienia po stronie falownika C2000+
1.1. Parametry związane z trybem pozycyjnym
• P00-10 na 1 – ustawienie trybu pozycyjnego (można to ustawić komunikacyjnie korzystając z Control mode adres 6001)
• P00-11 na 3 (IM FOC + Encoder) lub 4 (PM FOC + Encoder) – w zależności od typu silnika
• P11-40 na 5 – źródło komend pozycji z karty komunikacyjnej
• P11-43 – wybór maksymalnej częstotliwość zadanej w trybie pozycyjnym
• P11-44 i P11-45 – rampy przyspieszania i hamowania w trybie pozycyjnym
• P11-68 – wybór metody bazowania (dokładny opis metod bazowania znajduje się w manualu, w opisie parametru P11-68)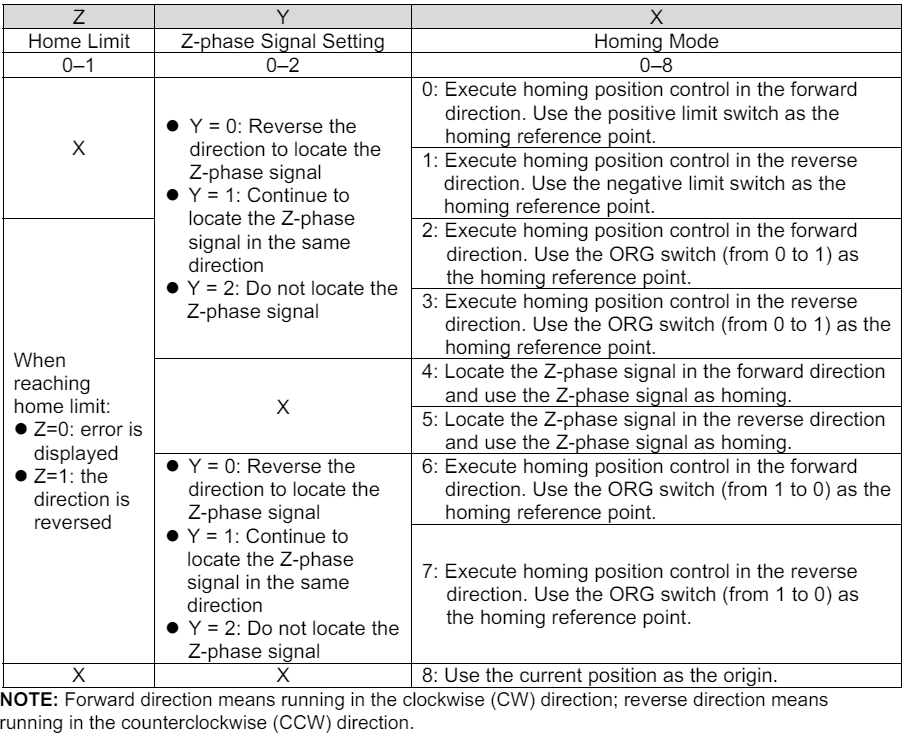
• P11-70 i P11-71 – prędkości homingu, pierwsza definiuje przejazd do czujnika bądź krańcówki, druga dotyczy ruchu po wykryciu zbocza czujnika bądź krańcówki.
• P11-72 – czas przyspieszania/hamowania dla hominguKorzystając z trybu pozycyjnego należy ustawić parametry enkodera:
• P10-00 – typ enkodera
• P10-01 – liczba impulsów na obrót
• P10-02 – kierunek zliczania impulsów1.2. Ustawienie parametrów komunikacji
Aby móc prawidłowo nawiązać komunikację i wysterować falownik należy ustawić następujące parametry:
• 00-20 = 8 (zadawanie częstotliwości z karty komunikacyjnej Ethernet/IP)
• 00-21 = 5 (zadawanie komendy RUN/STOP z karty komunikacyjnej Ethernet/IP)
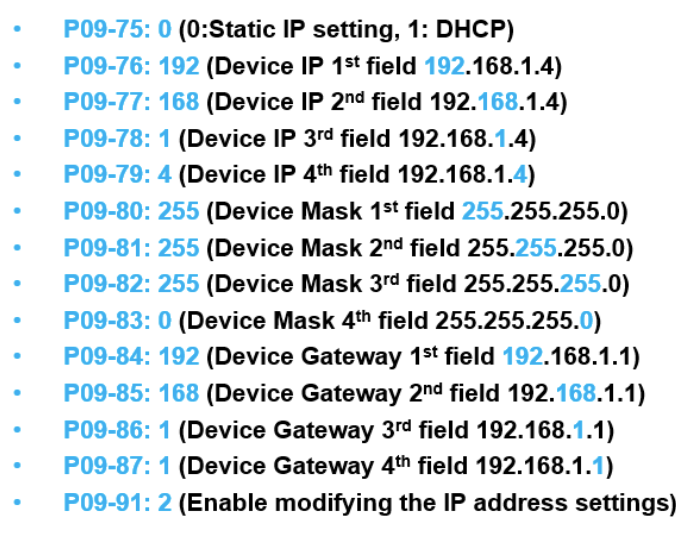
• 09-30 = 1 (wykorzystanie do komunikacji adresów 6xxx) lub 0 (wykorzystanie do komunikacji adresów 2xxx)1.3. Ustawienie adresu IP karty CMC-EIP01 np.:
2. Ustawienia po stronie sterownika serii AS
2.1. HWCONFIG
Po otwarciu projektu w ISPSoft trzeba otworzyć HWConfig, aby dodać falownik do sieci EtherNet/IP.
Należy kliknąć PPM na sterownik -> [Communication Software] -> [EtherNet/IP], żeby otworzyć podgląd sieci EtherNet/IP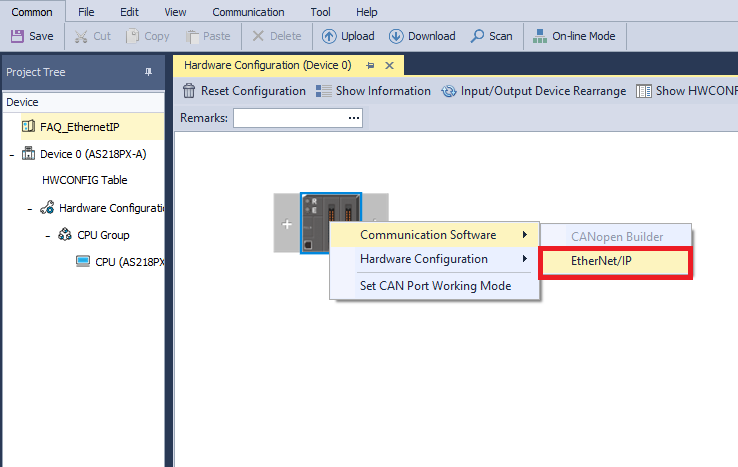
2.2. Dodanie urządzenia do sieci Ethernet/IP
W celu dodania urządzenia do sieci należy wybrać opcję Scan z zakładki Common, a następnie po otwarciu okna kliknąć przycisk Scan.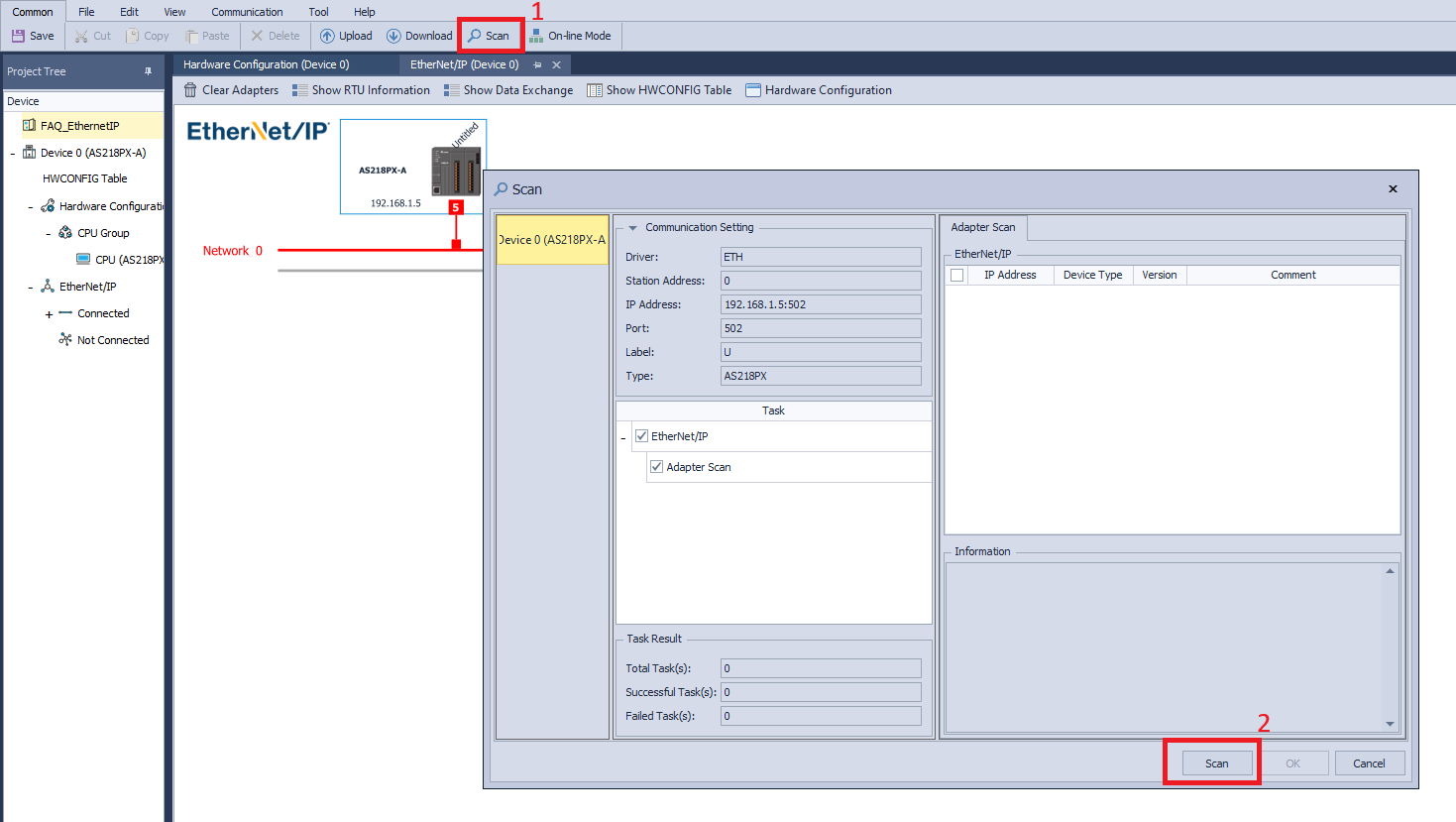
Po przeskanowaniu w zakładce Adapter Scan pojawią się urządzenia podłączone do sieci. Należy wybrać kartę komunikacyjną falownika CMC-EIP01 i kliknąć OK.
2.3. Konfiguracja wymiany danych
Kolejnym krokiem jest połączenie falownika z magistralą sieci Ethernet/IP oraz skonfigurowanie wymiany danych między falownikiem a sterownikiem PLC. Aby to zrobić, trzeba przejść do zakładki Show Data Exchange.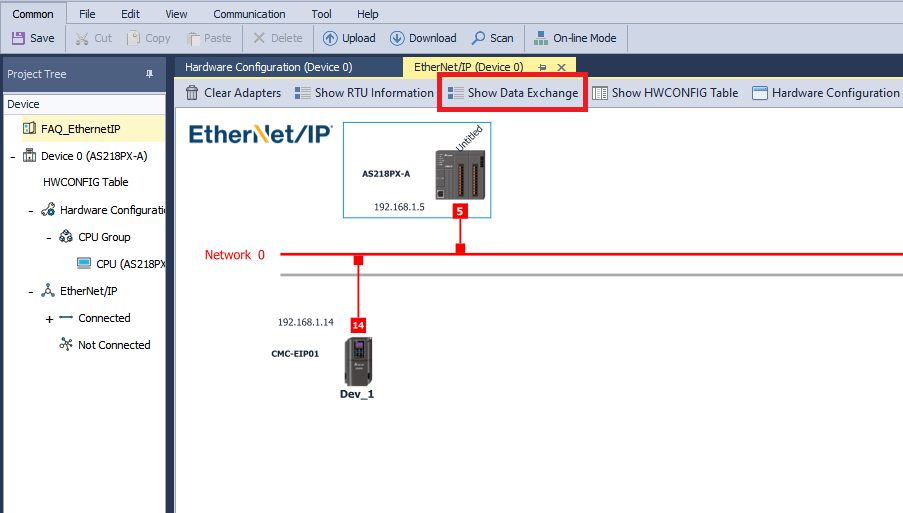
Po dodaniu falownika do sieci, automatycznie generowana jest domyślna wymiana danych. Poprzez podwójne kliknięcie na nią, można ją zmodyfikować. W otwartym oknie wybiera się adresy falownika, które będą odczytywane i zapisywane, oraz rejestry sterownika, które będą za nie odpowiadać.
Adresy rejestrów wraz z ich opisami można znaleźć w dokumentacji falownika. Należy zwrócić uwagę, że do sterowaniem falownikiem służy Control Word (adres 6000). Na końcu artykułu (w rozdziale 4) przedstawiono tabelę, która przedstawia działanie poszczególnych bitów control worda i znaczenie bitów status worda (adres 6100). Komendę częstotliwości ustawia się z wykorzystaniem Frequency limit (adres 6007). Pozycja zadana jest wyrażona 32-bitowo jako Target Position L i Target Position L (adresy 6004 i 6005).

Istnieje możliwość odnoszenia się do parametrów falownika w sposób komunikacyjny. Należy kliknąć na pole pod Adapter Parameter Setting, następnie otworzy się okno, gdzie z listy można wybrać odpowiedni parametr.
UWAGA 1. Odnosząc się komunikacyjnie do parametrów falownika trzeba zabezpieczyć jego pamięć EEPROM!
UWAGA 2. Jeżeli zabezpieczymy EEPROM, to wszystkie ustawiane parametry na falowniku ulotnią się po resecie zasilania.
UWAGA 3. Korzystając z zapisu tylko do rejestrów 60xx nie ma potrzeby zabezpieczenia EEPROM’u.Po skonfigurowaniu tabeli wymiany danych należy ją zatwierdzić przyciskiem OK, a następnie przeprowadzić wgrywanie ustawień HWCONFIG do PLC, przez kliknięcie Download. Po wykonaniu tych kroków można zamknąć HWCONFIG.
3. Przykładowy program w ISPSoft
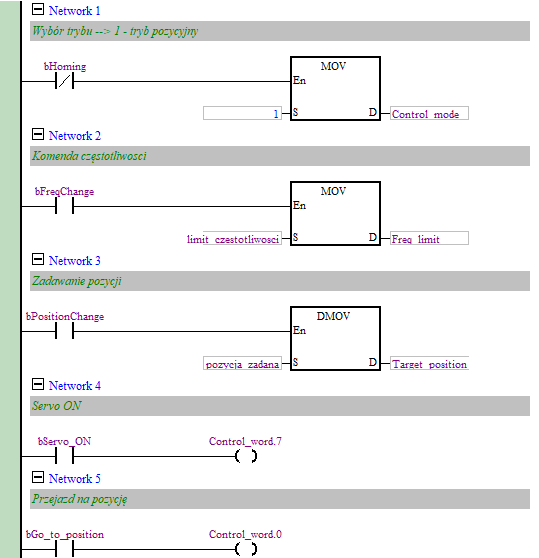
Przykład programu, który umożliwia sterowanie falownikiem w trybie pozycyjnym.
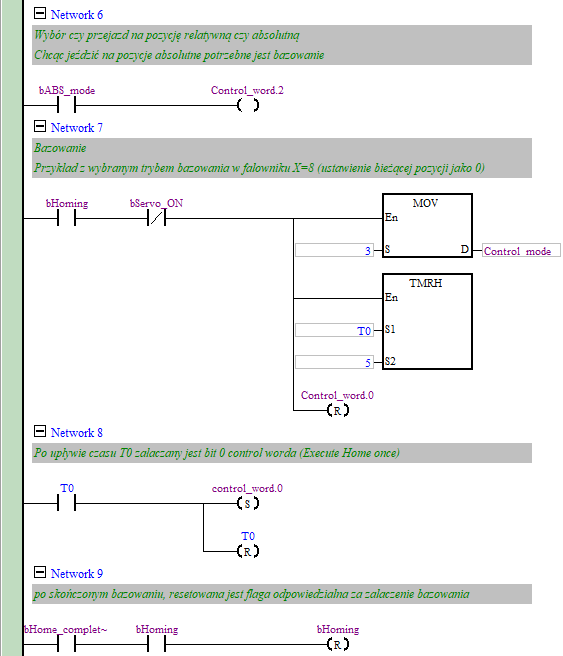
Do zmiennej Control_mode należy przypisać wartość 1, czyli ustawienie trybu pozycyjnego. Wpisanie wartości 3 do Control_mode załącza tryb bazowania. Następnie jest zadawana jest częstotliwość zmienną limit_czestotliwosci. Jednostką częstotliwości jest 0.01 Hz.
W kolejnej linii jest zadawanie pozycji zmienną pozycja_zadana. Przy wyłączonej fladze bABS_mode jazda jest ustawiona na pozycje relatywne, natomiast przy załączonej fladze jest ustawiona na pozycje absolutne.
bServo_ON odpowiada za załączenie obwodu mocy falownika, bGo_to_position wyzwala przejazd na zadaną pozycję. bABS_mode służy do zmiany trybu przejazdu z relatywnego na absolutny. Przy zmianie pracy ma absolutny, najpierw należy włączyć bazowanie.
bHoming służy do załączenia bazowania.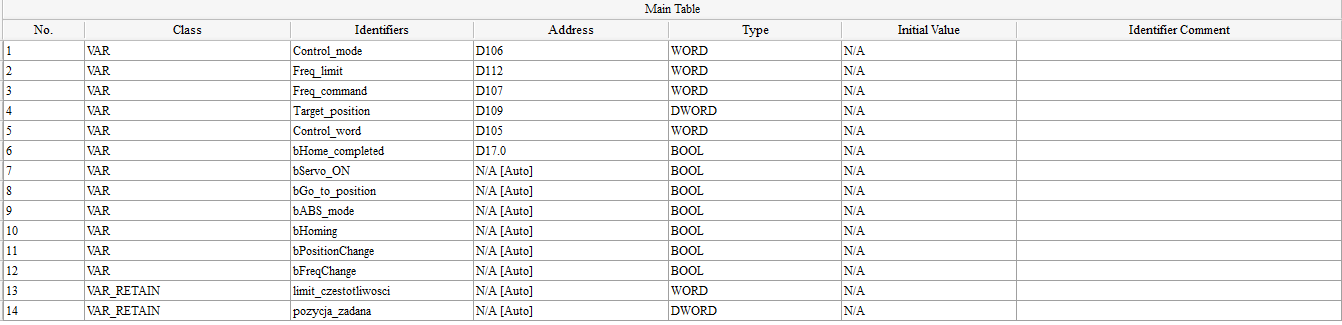
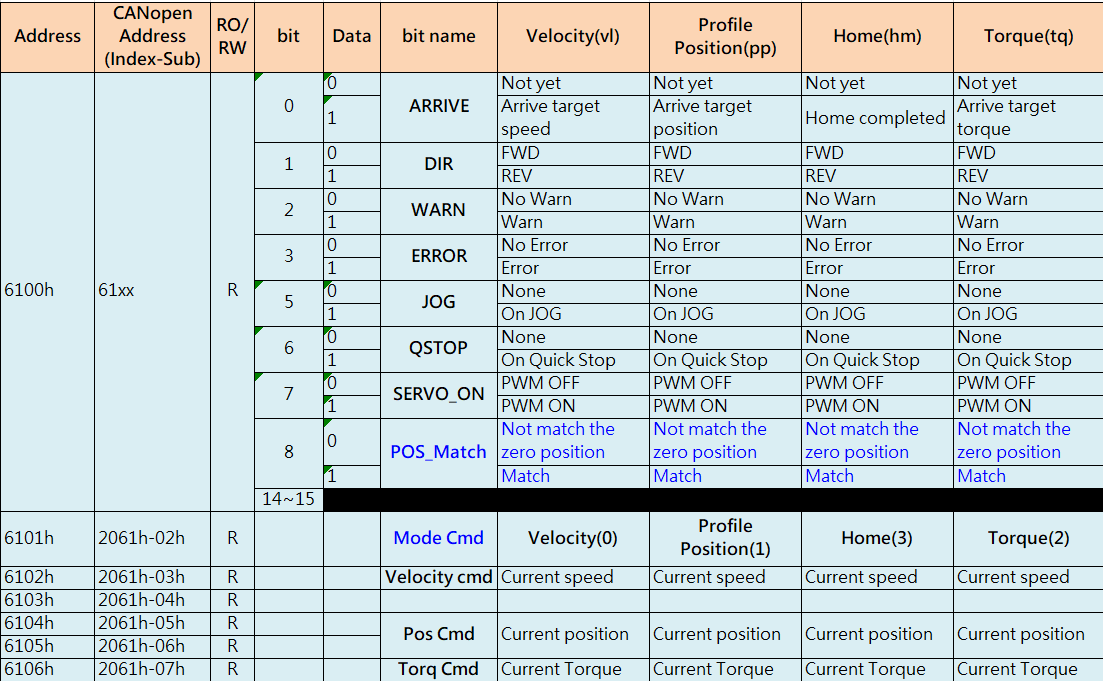
4. Tabele adresów 60XX i 61XX
Tabela Control Word:
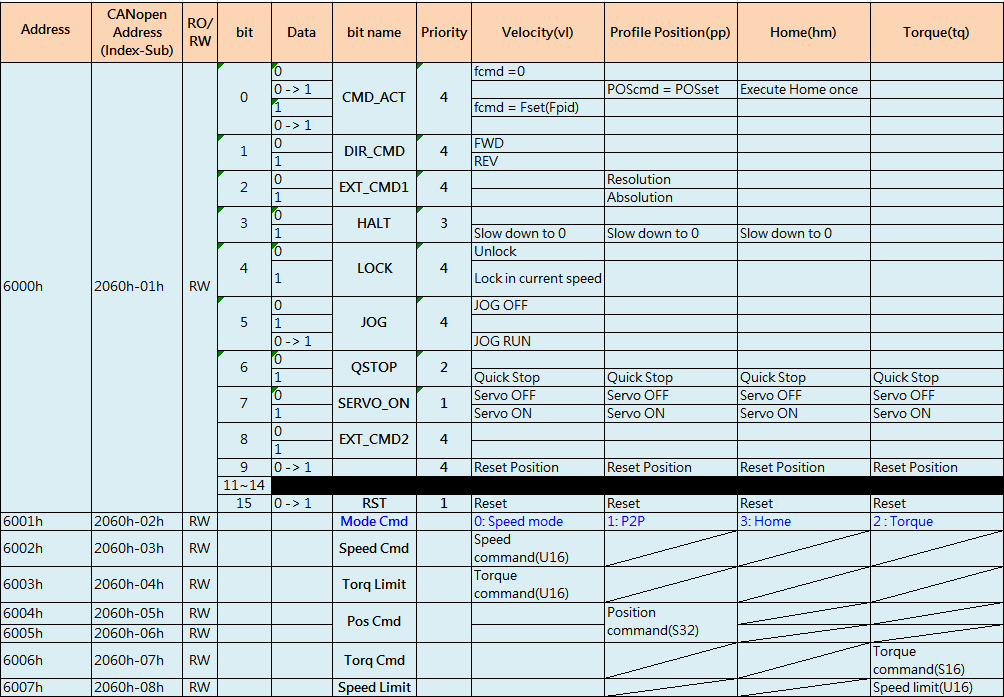
Tabela Status Word
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 11 lutego 2025
- Jak skonfigurować EtherNet/IP w falownikach serii C2000+ w trybie momentowym?
1. Ustawienia po stronie falownika C2000+
1.1. Parametry związane z trybem momentowym
P00-13
• 0 = IM TQCPG – Tryb momentowy, wektorowy w pętli zamkniętej dla silników IM
• 1 = PM TQCPG – Tryb momentowy, wektorowy w pętli zamkniętej dla silników PM
• 2 = IM TQC sensorless – Tryb momentowy, wektorowy bezczujnikowy dla silników IM
• 4 = SynRM TQC – Tryb momentowy, wektorowy bezczujnikowy dla silnikówKorzystając z pracy w pętli zamkniętej należy ustawić parametry enkodera:
P10-00 – typ enkodera
P10-01 – liczba impulsów na obrót
P10-02 – kierunek zliczania impulsówP11-33 = 5 (źródło momentu zadanego – karta komunikacyjna Ethernet/IP)
1.2. Ustawienie parametrów komunikacji
Aby móc prawidłowo nawiązać komunikację i wysterować falownik należy ustawić następujące parametry:
P00-20 = 8 (zadawanie częstotliwości z karty komunikacyjnej Ethernet/IP)
P00-21 = 5 (zadawanie komendy RUN/STOP z karty komunikacyjnej Ethernet/IP)
P09-30 = 1 (wykorzystanie do komunikacji adresów 6xxx) lub 0 (wykorzystanie do komunikacji adresów 2xxx)1.3.Ustawienie adresu IP karty CMC-EIP01 np.:
2. Ustawienia po stronie sterownika serii AS
2.1. HWCONFIG
Po otwarciu projektu w ISPSoft trzeba otworzyć HWConfig, aby dodać falownik do sieci EtherNet/IP.
Należy kliknąć PPM na sterownik -> [Communication Software] -> [EtherNet/IP], żeby otworzyć podgląd sieci EtherNet/IP: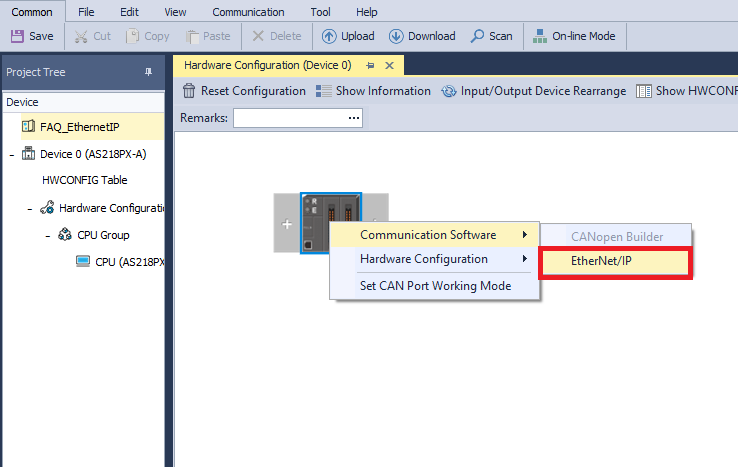
2.2. Dodanie urządzenia do sieci Ethernet/IP
W celu dodania urządzenia do sieci należy wybrać opcję Scan z zakładki Common, a następnie po otwarciu okna kliknąć przycisk Scan:
Po przeskanowaniu w zakładce Adapter Scan pojawią się urządzenia podłączone do sieci. Należy wybrać kartę komunikacyjną falownika CMC-EIP01 i kliknąć OK.
2.3. Konfiguracja wymiany danych
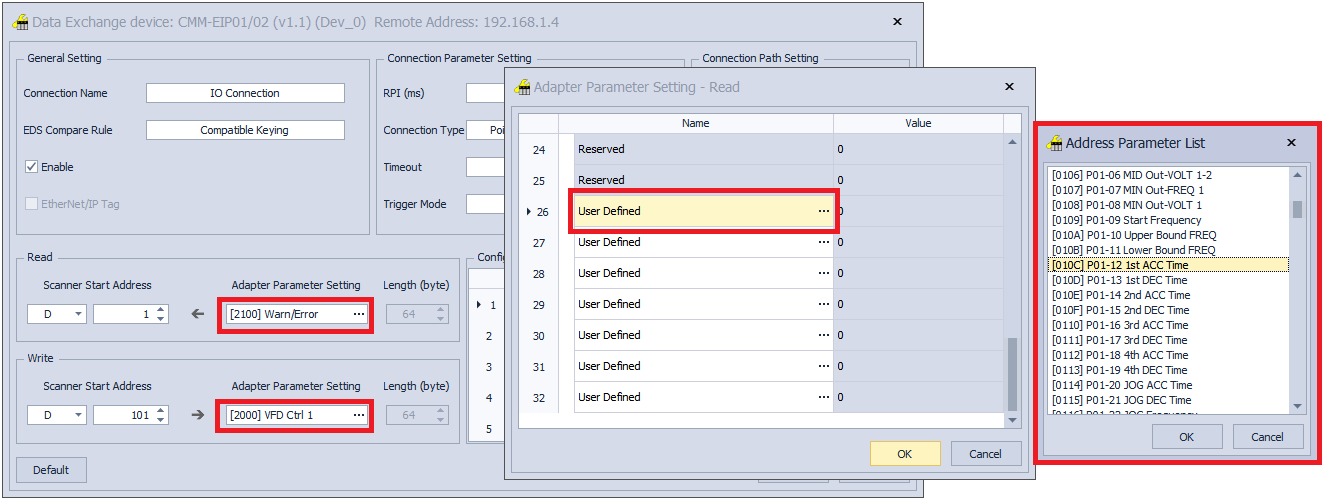
Kolejnym krokiem jest połączenie falownika z magistralą sieci Ethernet/IP oraz skonfigurowanie wymiany danych między falownikiem a sterownikiem PLC. Aby to zrobić, trzeba przejść do zakładki Show Data Exchange.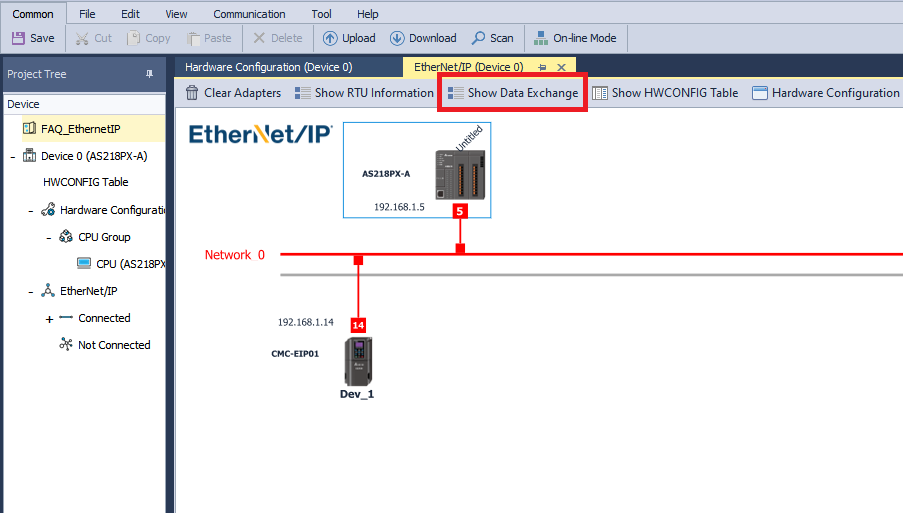
Po dodaniu falownika do sieci, automatycznie generowana jest domyślna wymiana danych. Poprzez podwójne kliknięcie na nią, można ją zmodyfikować. W otwartym oknie wybiera się adresy falownika, które będą odczytywane i zapisywane, oraz rejestry sterownika, które będą za nie odpowiadać.
Adresy rejestrów wraz z ich opisami można znaleźć w dokumentacji falownika. Należy zwrócić uwagę, że komenda momentu zadanego to Torque Command (adres 6006), a limit maksymalnego momentu to Torque Limit (adres 6003). Ograniczenie prędkości dla trybu momentowego to Frequency Limit (adres 6007).
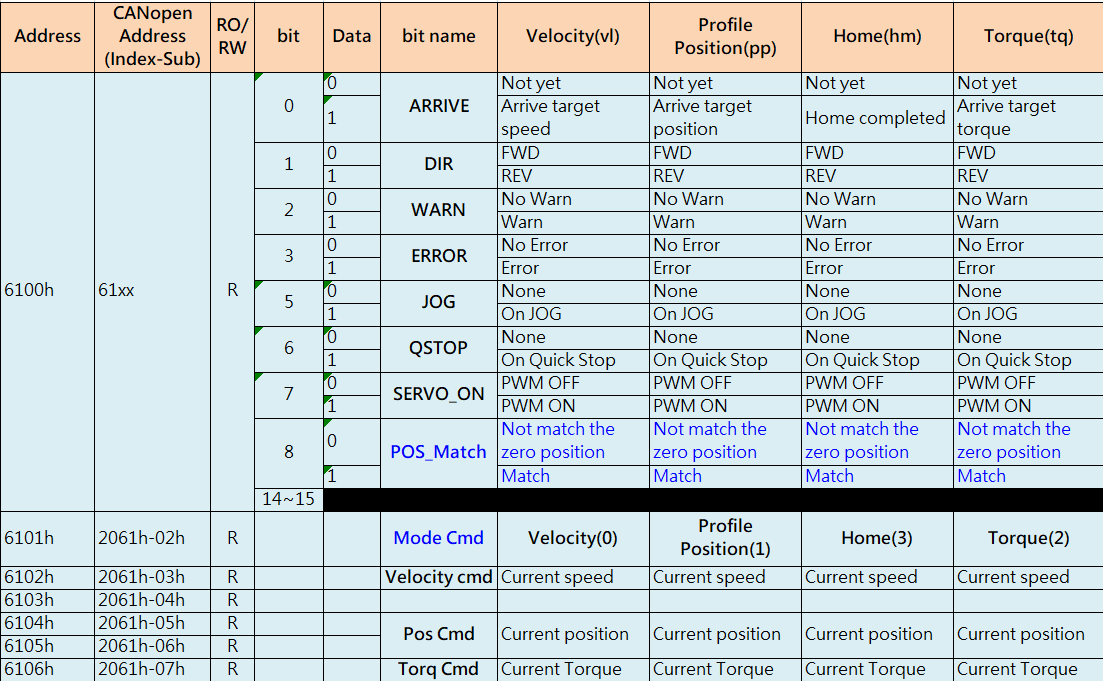
Na końcu artykułu (w rozdziale 4) przedstawiono tabelę, która przedstawia działanie poszczególnych bitów control worda i znaczenie bitów status worda (adres 6100).
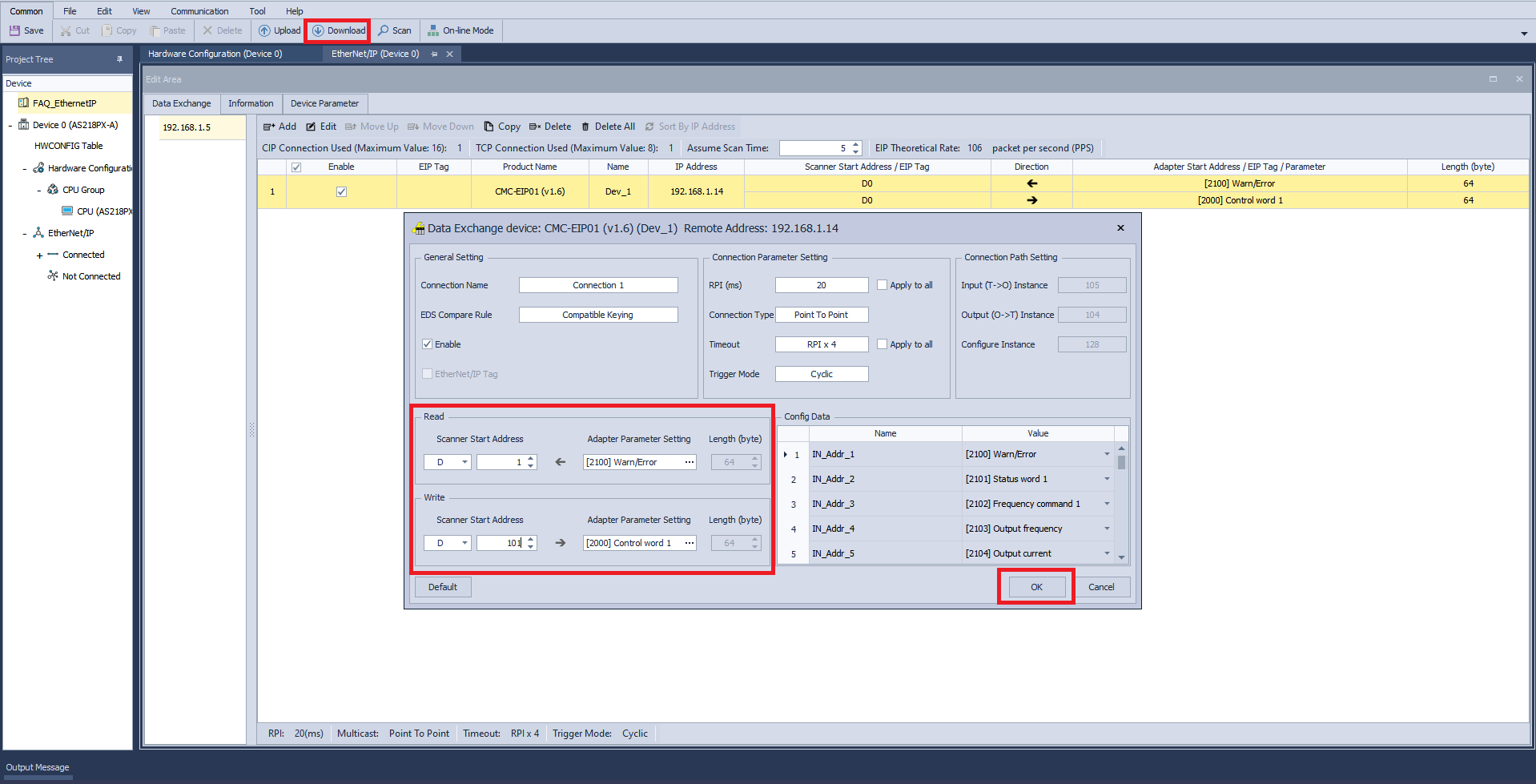
Istnieje możliwość odnoszenia się do parametrów falownika w sposób komunikacyjny. Należy kliknąć na pole pod Adapter Parameter Setting, następnie otworzy się okno, gdzie z listy można wybrać odpowiedni parametr.
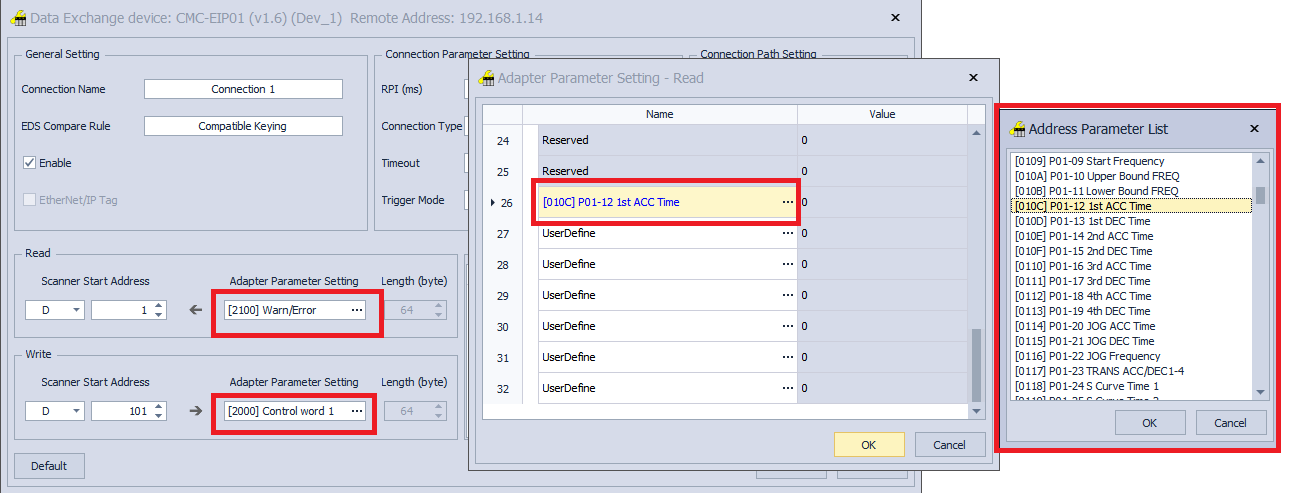
UWAGA 1. Odnosząc się komunikacyjnie do parametrów falownika trzeba zabezpieczyć jego pamięć EEPROM!
UWAGA 2. Jeżeli zabezpieczymy EEPROM, to wszystkie ustawiane parametry na falowniku ulotnią się po resecie zasilania.
UWAGA 3. Korzystając z zapisu tylko do rejestrów 60xx nie ma potrzeby zabezpieczenia EEPROM’u.Po skonfigurowaniu tabeli wymiany danych należy ją zatwierdzić przyciskiem OK, a następnie przeprowadzić wgrywanie ustawień HWCONFIG do PLC, przez kliknięcie Download. Po wykonaniu tych kroków można zamknąć HWCONFIG.
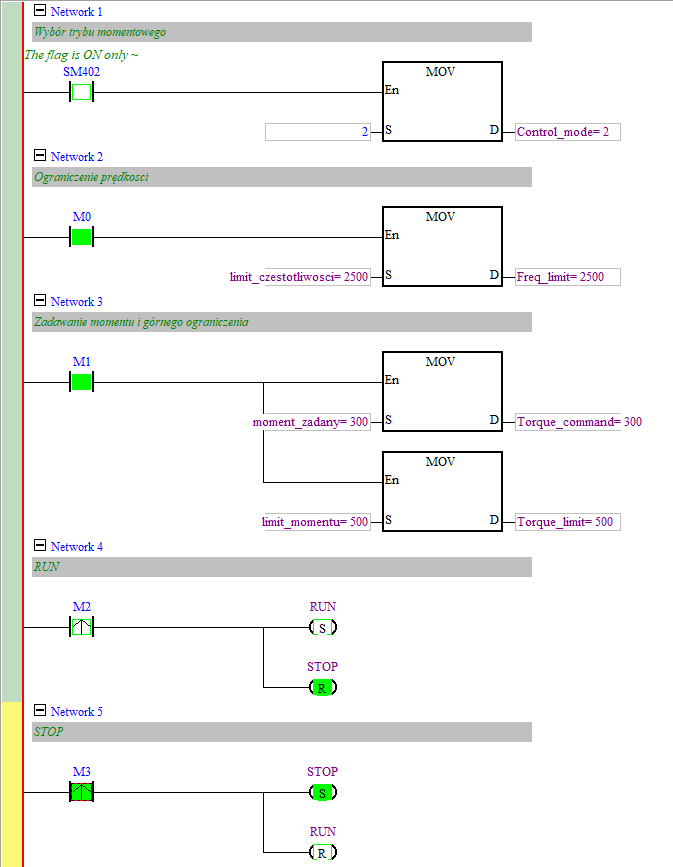
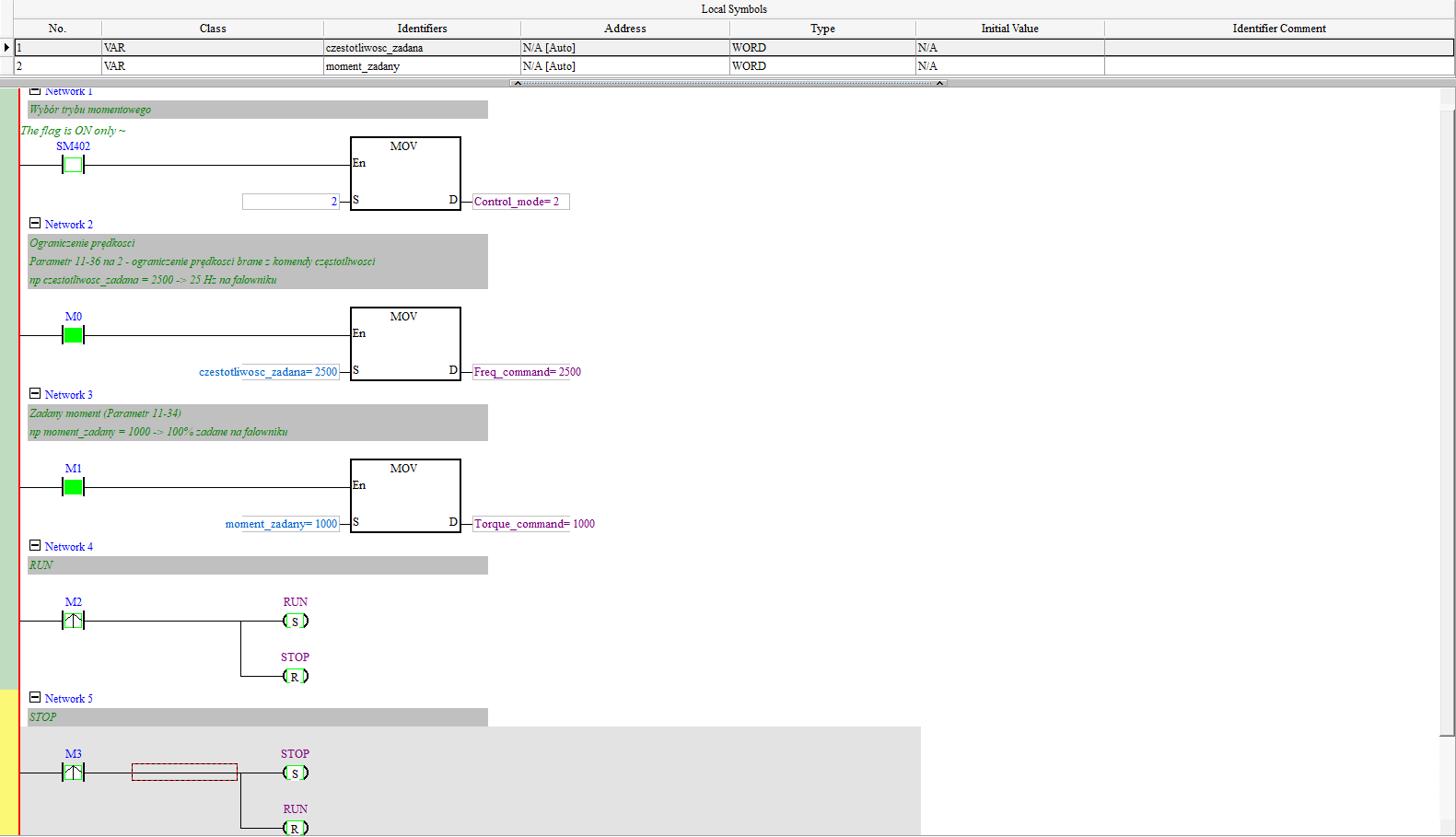
3. Przykładowy program w ISPSoft
Przykład programu, który umożliwia sterowanie falownikiem, ustawianie momentu zadanego oraz określanie ograniczeń prędkości falownika.
Do zmiennej Control_mode należy przypisać wartość 2, czyli ustawienie trybu momentowego. Ograniczenie prędkości oraz ustala się w zmiennej limit_czestotliwosci. Moment zadany ustawia w zmiennej moment_zadany, a górny limit momentu w limit_momentu. Jednostka momentu to 0.1% i oznacza procent znamionowego momentu falownika, natomiast jednostką częstotliwości jest 0.01 Hz.
W pozostałej części programu jest wywołanie komendy RUN za pomocą flagi M2, a do zatrzymania służy flaga M3.

4. Tabele Control word i status word
Tabela Control Word:
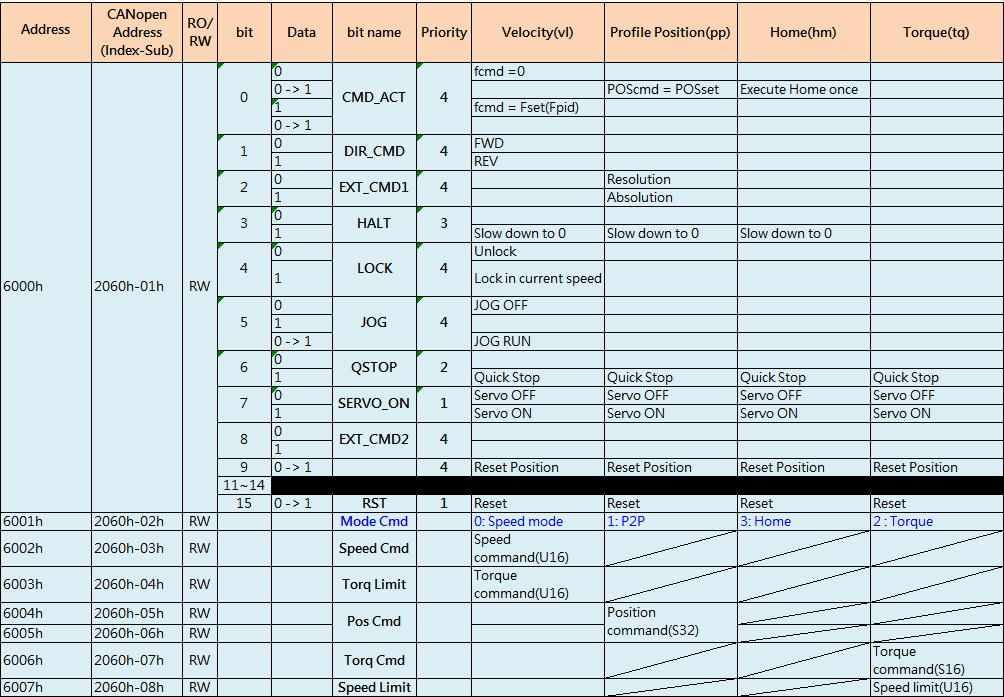
Tabela Status Word:
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 11 lutego 2025
- Jak skonfigurować EtherNet/IP w falownikach serii C2000+ w trybie prędkościowym?
1. Ustawienia po stronie falownika C2000+
1.1. Ustawienie parametrów komunikacji
Aby móc prawidłowo nawiązać komunikację i wysterować falownik należy ustawić następujące parametry:
00-20 = 8 (zadawanie częstotliwości z karty komunikacyjnej Ethernet/IP)
00-21 = 5 (zadawanie komendy RUN/STOP z karty komunikacyjnej Ethernet/IP)
09-30 = 1 (wykorzystanie do komunikacji adresów 6xxx) lub 0 (wykorzystanie do komunikacji adresów 2xxx)1.2. Ustawienie adresu IP karty CMC-EIP01 np.:
2. Ustawienia po stronie sterownika serii AS
2.1. HWCONFIG
Po otwarciu projektu w ISPSoft trzeba otworzyć HWConfig, aby dodać falownik do sieci EtherNet/IP.
Należy kliknąć PPM na sterownik -> [Communication Software] -> [EtherNet/IP], żeby otworzyć podgląd sieci EtherNet/IP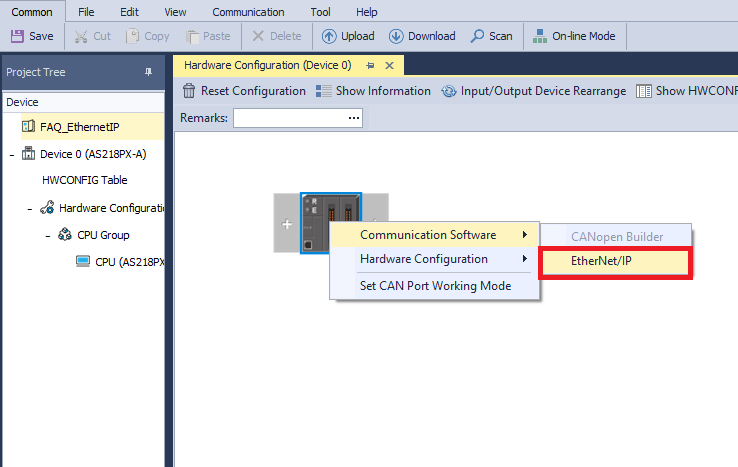
2.2. Dodanie urządzenia do sieci Ethernet/IP
W celu dodania urządzenia do sieci należy wybrać opcję Scan z zakładki Common, a następnie po otwarciu okna kliknąć przycisk Scan.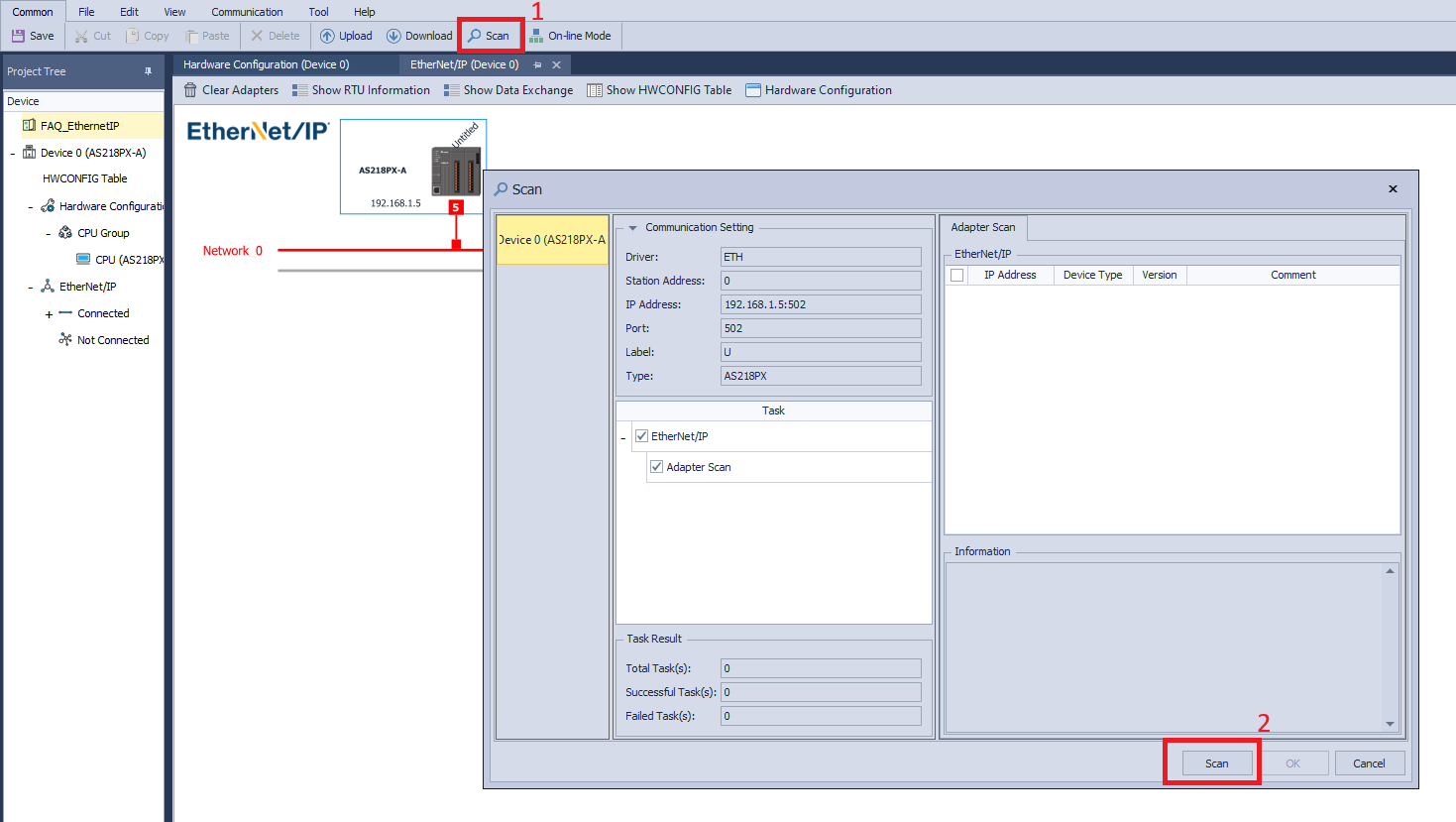
Po przeskanowaniu w zakładce Adapter Scan pojawią się urządzenia podłączone do sieci. Należy wybrać kartę komunikacyjną falownika CMC-EIP01 i kliknąć OK.
2.3. Konfiguracja wymiany danych
Kolejnym krokiem jest połączenie falownika z magistralą sieci Ethernet/IP oraz skonfigurowanie wymiany danych między falownikiem a sterownikiem PLC. Aby to zrobić, trzeba przejść do zakładki Show Data Exchange.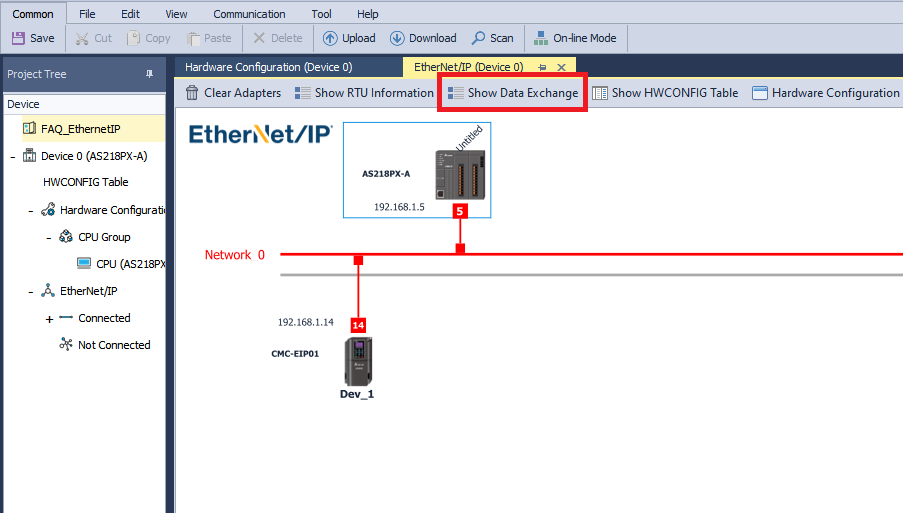
Po dodaniu falownika do sieci, automatycznie generowana jest domyślna wymiana danych. Poprzez podwójne kliknięcie na nią, można ją zmodyfikować. W otwartym oknie wybiera się adresy falownika, które będą odczytywane i zapisywane, oraz rejestry sterownika, które będą za nie odpowiadać.
Adresy rejestrów wraz z ich opisami można znaleźć w dokumentacji falownika. Należy zwrócić uwagę, że do sterowaniem falownikiem służy Control Word (adres 6000). Na końcu artykułu (w rozdziale 4) przedstawiono tabelę, która przedstawia działanie poszczególnych bitów control worda i znaczenie bitów status worda (adres 6100). Komendę częstotliwości ustawia się z wykorzystaniem Frequency limit (adres 6007).
Istnieje możliwość odnoszenia się do parametrów falownika w sposób komunikacyjny. Należy kliknąć na pole pod Adapter Parameter Setting, następnie otworzy się okno, gdzie z listy można wybrać odpowiedni parametr.
UWAGA 1. Odnosząc się komunikacyjnie do parametrów falownika trzeba zabezpieczyć jego pamięć EEPROM!
UWAGA 2. Jeżeli zabezpieczymy EEPROM, to wszystkie ustawiane parametry na falowniku ulotnią się po resecie zasilania.
UWAGA 3. Korzystając z zapisu tylko do rejestrów 60xx nie ma potrzeby zabezpieczenia EEPROM’u.Po skonfigurowaniu tabeli wymiany danych należy ją zatwierdzić przyciskiem OK, a następnie przeprowadzić wgrywanie ustawień HWCONFIG do PLC, przez kliknięcie Download. Po wykonaniu tych kroków można zamknąć HWCONFIG.
3. Przykładowy program w ISPSoft
Przykład programu, który umożliwia sterowanie falownikiem, oraz zmianę częstotliwości zadanej.
Do zmiennej Control_mode należy przypisać wartość 0, czyli ustawienie trybu prędkościowego. Następnie jest zadawana jest częstotliwość zmienną częstotliwość_zadana. Jednostką częstotliwości jest 0.01 Hz.
W pozostałej części programu jest wywołanie komend załączenia obwodu mocy falownika za pomocą flagi M1. Wykonywania ruchu z zadaną prędkością załączane jest flagą M2.

4. Tabele Control word i Status word
Tabela Control Word:
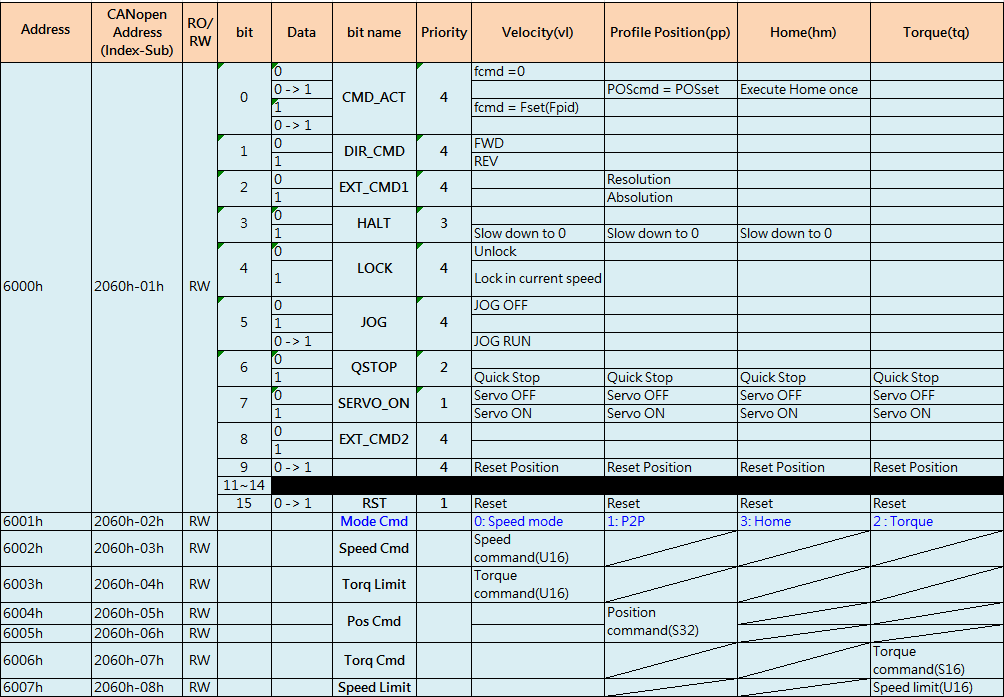
Tabela Status Word:

Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 11 lutego 2025
- Jak skonfigurować EtherNet/IP w falownikach serii MS300 w trybie momentowym?
1. Ustawienia po stronie falownika MS300
1.1. Ustawienie źródła momentu zadanego
11-33 = 5 (źródło momentu zadanego – karta komunikacyjna Ethernet/IP)
11-36 = 2 (ograniczenie prędkości z komendy częstotliwości, którą można ustawiać komunikacyjnie przez EtherNet/IP)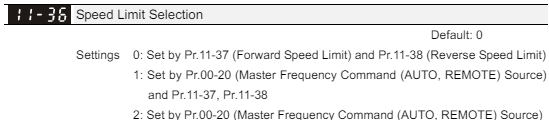
1.2. Ustawienie parametrów komunikacji
Aby móc prawidłowo nawiązać komunikację i wysterować falownik należy ustawić następujące parametry:
00-20 = 8 (zadawanie częstotliwości z karty komunikacyjnej Ethernet/IP)
00-21 = 5 (zadawanie komendy RUN/STOP z karty komunikacyjnej Ethernet/IP)
09-30 = 1 (wykorzystanie do komunikacji adresów 6xxx) lub 0 (wykorzystanie do komunikacji adresów 2xxx)1.3. Ustawienie adresu IP karty CMM-EIP02 np:
2. Ustawienia po stronie sterownika serii AS
2.1. HWCONFIG
Po otwarciu projektu w ISPSoft trzeba otworzyć HWConfig, aby dodać falownik do sieci EtherNet/IP.
Należy kliknąć PPM na sterownik -> [Communication Software] -> [EtherNet/IP], żeby otworzyć podgląd sieci EtherNet/IP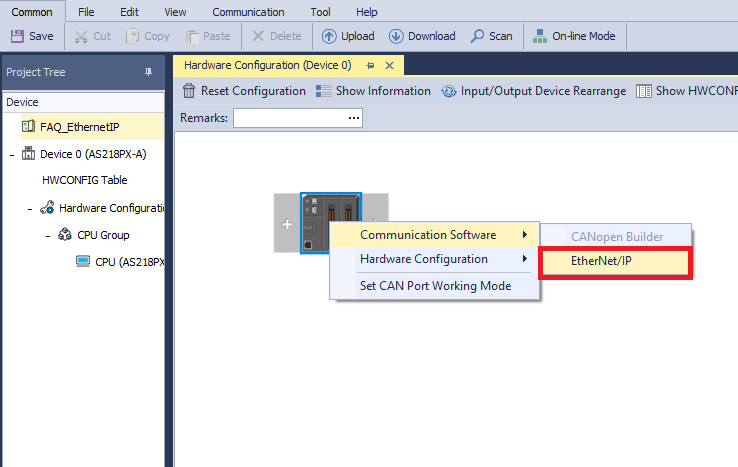
2.2. Dodanie urządzenia do sieci Ethernet/IP
W celu dodania urządzenia do sieci należy wybrać opcję Scan z zakładki Common, a następnie po otwarciu okna kliknąć przycisk Scan: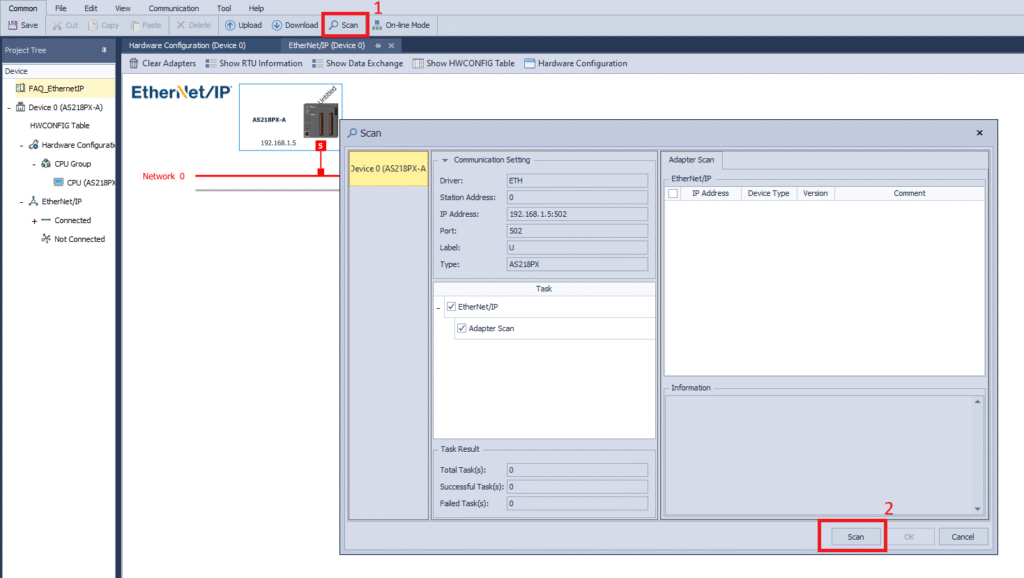
Po przeskanowaniu w zakładce Adapter Scan pojawią się urządzenia podłączone do sieci. Należy wybrać kartę komunikacyjną falownika CMM-EIP02 i kliknąć OK.
2.3. Konfiguracja wymiany danych
Kolejnym krokiem jest połączenie falownika z magistralą sieci Ethernet/IP oraz skonfigurowanie wymiany danych między falownikiem, a sterownikiem PLC. Aby to zrobić, trzeba przejść do zakładki Show Data Exchange.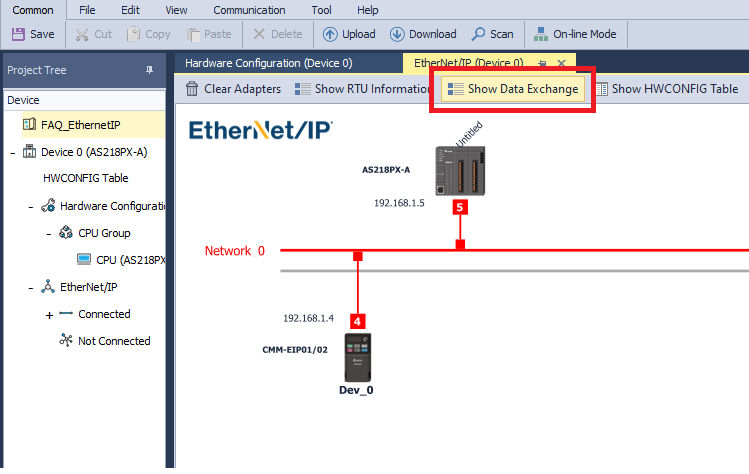
Po dodaniu falownika do sieci, automatycznie generowana jest domyślna wymiana danych. Poprzez podwójne kliknięcie na nią, można ją zmodyfikować. W otwartym oknie wybiera się adresy falownika, które będą odczytywane i zapisywane, oraz rejestry sterownika, które będą za nie odpowiadać.
Adresy rejestrów wraz z ich opisami można znaleźć w dokumentacji falownika. Należy zwrócić uwagę, że komenda momentu zadanego to Square Command (adres 6006), a limit maksymalnego momentu to Square Limit (adres 6003).
Na końcu artykułu (w rozdziale 4) przedstawiono tabelę, która przedstawia działanie poszczególnych bitów control worda i znaczenie bitów status worda (adres 6100).
Istnieje możliwość odnoszenia się do parametrów falownika w sposób komunikacyjny. Należy kliknąć na pole pod Adapter Parameter Setting, następnie otworzy się okno, gdzie z listy można wybrać odpowiedni parametr.
UWAGA 1. Odnosząc się komunikacyjnie do parametrów falownika trzeba zabezpieczyć jego pamięć EEPROM!
UWAGA 2. Jeżeli zabezpieczymy EEPROM, to wszystkie ustawiane parametry na falowniku ulotnią się po resecie zasilania.
UWAGA 3. Korzystając z zapisu tylko do rejestrów 60xx nie ma potrzeby zabezpieczenia EEPROM’u.Po skonfigurowaniu tabeli wymiany danych należy ją zatwierdzić przyciskiem OK, a następnie przeprowadzić wgrywanie ustawień HWCONFIG do PLC, przez kliknięcie Download. Po wykonaniu tych kroków można zamknąć HWCONFIG.
3. Przykładowy program w ISPSoft
Przykład programu, który umożliwia sterowanie falownikiem, ustawianie momentu zadanego oraz określanie ograniczeń prędkości falownika.
Do zmiennej Control_mode należy przypisać wartość 2, czyli ustawienie trybu momentowego. Ograniczenie prędkości oraz zadany moment ustala się w zmiennych częstotliwość_zadana oraz moment_zadany. Jednostka momentu to 0.1% i oznacza procent znamionowego momentu falownika, natomiast jednostką częstotliwości jest 0.01 Hz.
W pozostałej części programu jest wywołanie komendy RUN za pomocą flagi M2, a do zatrzymania służy flaga M3.
4. Tabele Control word i status word
Tabela Control Word:
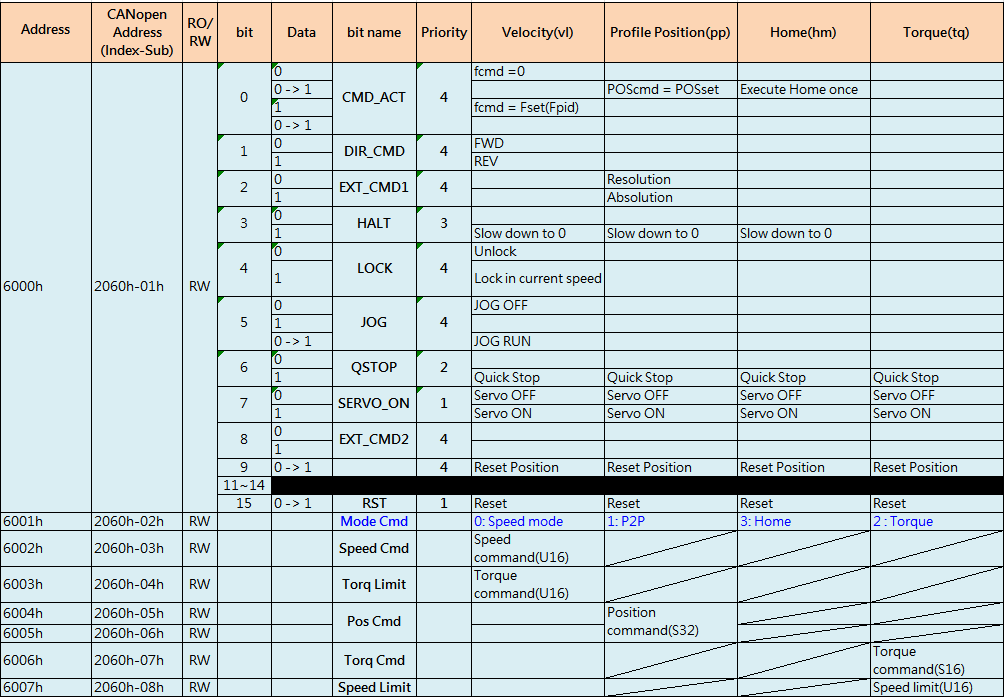
Tabela Status Word
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
Ostatnia aktualizacja: 11 lutego 2025
- Jak skonfigurować EtherNet/IP w falownikach serii MS300 w trybie prędkościowym?
1. Ustawienia po stronie falownika MS300
1.1. Ustawienie parametrów komunikacji
Aby móc prawidłowo nawiązać komunikację i wysterować falownik należy ustawić następujące parametry:
00-20 = 8 (zadawanie częstotliwości z karty komunikacyjnej Ethernet/IP)
00-21 = 5 (zadawanie komendy RUN/STOP z karty komunikacyjnej Ethernet/IP)
09-30 = 1 (wykorzystanie do komunikacji adresów 6xxx) lub 0 (wykorzystanie do komunikacji adresów 2xxx)1.2. Ustawienie adresu IP karty CMM-EIP01 np.:
2. Ustawienia po stronie sterownika serii AS
2.1. HWCONFIG
Po otwarciu projektu w ISPSoft trzeba otworzyć HWConfig, aby dodać falownik do sieci EtherNet/IP.
Należy kliknąć PPM na sterownik -> [Communication Software] -> [EtherNet/IP], żeby otworzyć podgląd sieci EtherNet/IP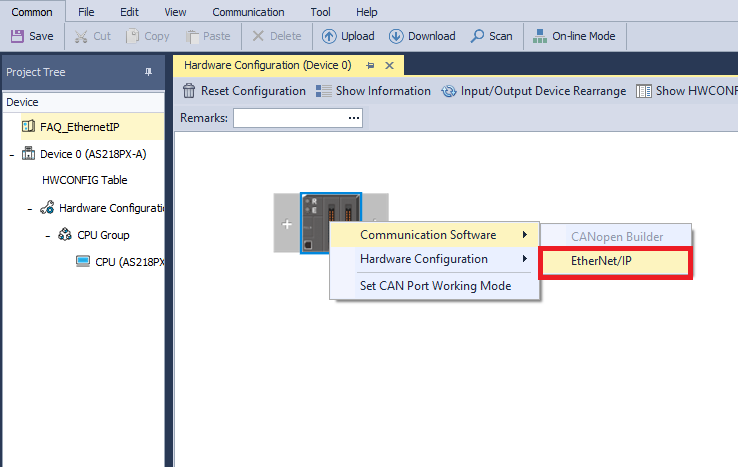
2.2. Dodanie urządzenia do sieci Ethernet/IP
W celu dodania urządzenia do sieci należy wybrać opcję Scan z zakładki Common, a następnie po otwarciu okna kliknąć przycisk Scan.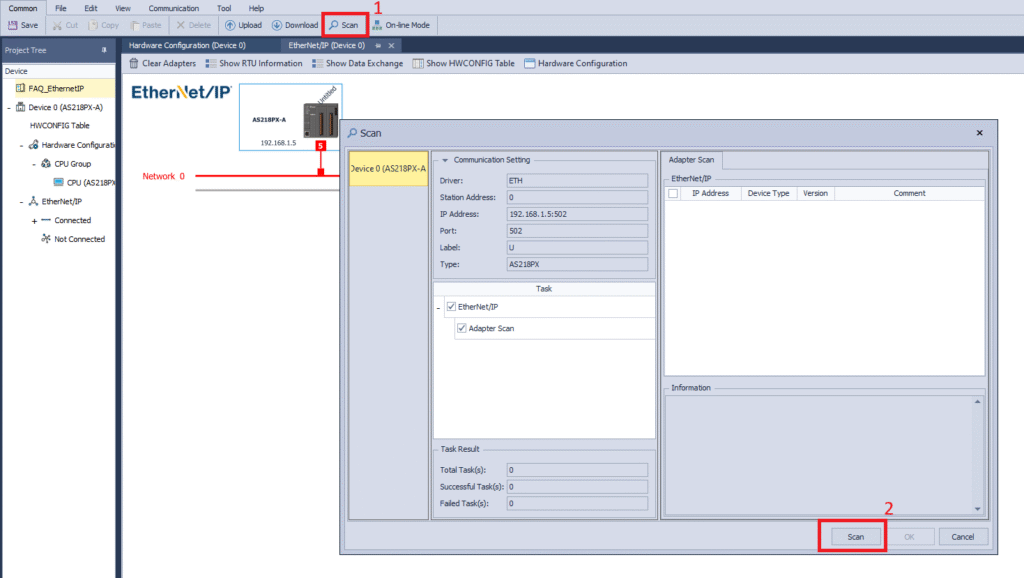
Po przeskanowaniu w zakładce Adapter Scan pojawią się urządzenia podłączone do sieci. Należy wybrać kartę komunikacyjną falownika CMM-EIP01 i kliknąć OK.
2.3. Konfiguracja wymiany danych
Kolejnym krokiem jest połączenie falownika z magistralą sieci Ethernet/IP oraz skonfigurowanie wymiany danych między falownikiem a sterownikiem PLC. Aby to zrobić, trzeba przejść do zakładki Show Data Exchange.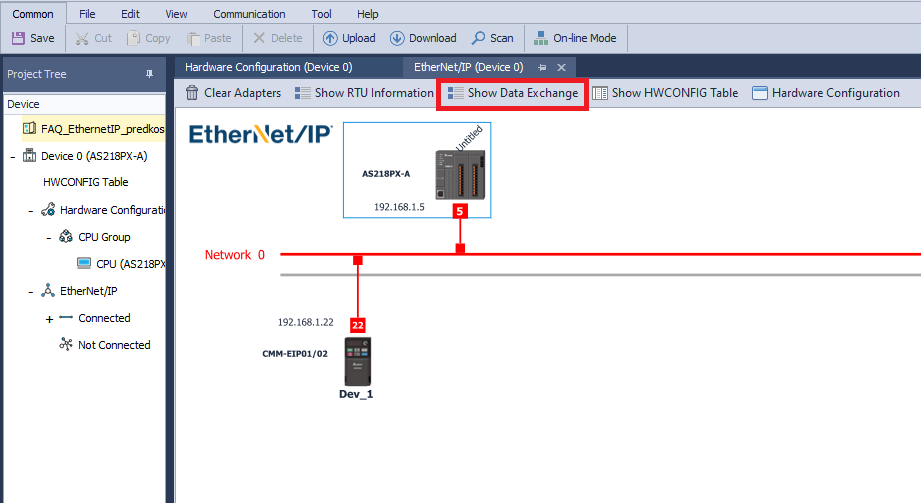
Po dodaniu falownika do sieci, automatycznie generowana jest domyślna wymiana danych. Poprzez podwójne kliknięcie na nią, można ją zmodyfikować. W otwartym oknie wybiera się adresy falownika, które będą odczytywane i zapisywane, oraz rejestry sterownika, które będą za nie odpowiadać.
Adresy rejestrów wraz z ich opisami można znaleźć w dokumentacji falownika. Należy zwrócić uwagę, że do sterowaniem falownikiem służy Control Word (adres 6000). Na końcu artykułu przedstawiono tabelę, która przedstawia działanie poszczególnych bitów control worda. Komendę częstotliwości ustawia się z wykorzystaniem Frequency limit (adres 6007).
Na końcu odpowiedzi (w rozdziale 4) przedstawiono tabelę, która przedstawia działanie poszczególnych bitów control worda i znaczenie bitów status worda (adres 6100).
Istnieje możliwość odnoszenia się do parametrów falownika w sposób komunikacyjny. Należy kliknąć na pole pod Adapter Parameter Setting, następnie otworzy się okno, gdzie z listy można wybrać odpowiedni parametr.
UWAGA 1. Odnosząc się komunikacyjnie do parametrów falownika trzeba zabezpieczyć jego pamięć EEPROM!
UWAGA 2. Jeżeli zabezpieczymy EEPROM, to wszystkie ustawiane parametry na falowniku ulotnią się po resecie zasilania.
UWAGA 3. Korzystając z zapisu tylko do rejestrów 60xx nie ma potrzeby zabezpieczenia EEPROM’u.Po skonfigurowaniu tabeli wymiany danych należy ją zatwierdzić przyciskiem OK, a następnie przeprowadzić wgrywanie ustawień HWCONFIG do PLC, przez kliknięcie Download. Po wykonaniu tych kroków można zamknąć HWCONFIG.
3. Przykładowy program w ISPSoft
Przykład programu, który umożliwia sterowanie falownikiem, oraz zmianę częstotliwości zadanej.
Do zmiennej Control_mode należy przypisać wartość 0, czyli ustawienie trybu prędkościowego. Następnie jest zadawana jest częstotliwość zmienną częstotliwość_zadana. Jednostką częstotliwości jest 0.01 Hz.
W pozostałej części programu jest wywołanie komend załączenia obwodu mocy falownika za pomocą flagi M1. Wykonywania ruchu z zadaną prędkością załączane jest flagą M2.
4. Tabele Control word i Status word
Tabela Control Word:
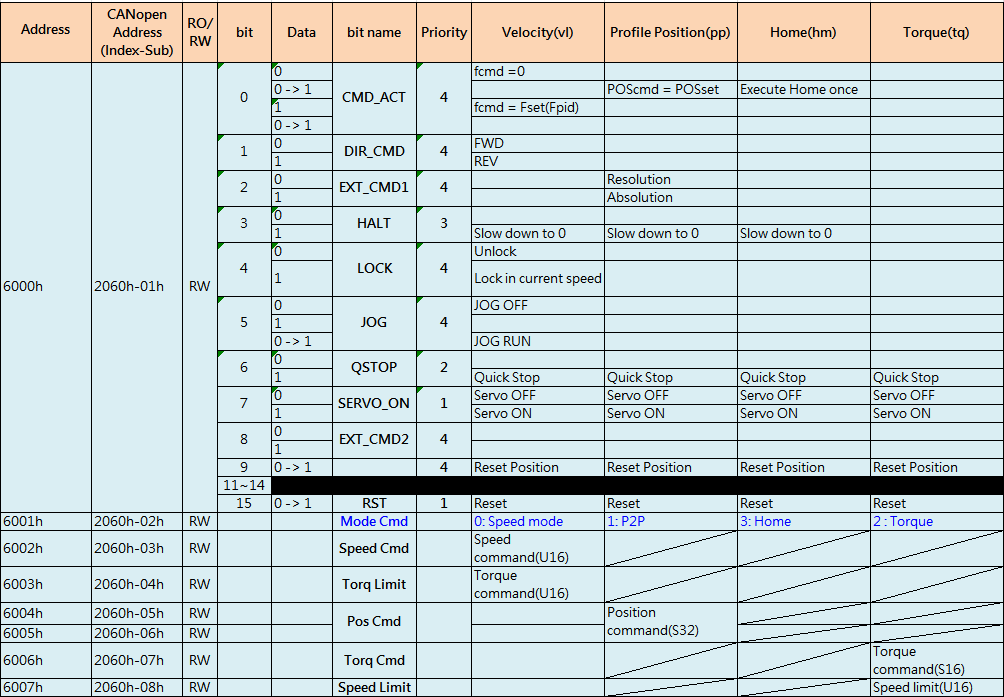
Tabela Status Word
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 11 lutego 2025
- Jak skonfigurować EtherCAT w falownikach serii C2000+ w trybie pozycyjnym?
Ustawiamy na falowniku parametry:
01-00, 01-01, 01-02 według tabliczki znamionowej silnika
Następnie przeprowadzamy Auto-tuning silnika (opisany w oddzielnym FAQ)
Konfigurujemy enkoder w parametrach 10-00 (typ enkodera), 10-01 (liczba impulsów na obrót), 10-02 (typ sygnałów wejściowych)
Kolejno ustawiamy parametry:
00-10 na 1 (później i tak nadpisze nam się to komunikacyjnie)
00-11 według tego jaki mamy silnik wybieramy któryś tryb z enkoderem (dokładny opis parametru w instrukcji)
00-20 na 8
00-21 na 5
09-30, 09-40 na 1
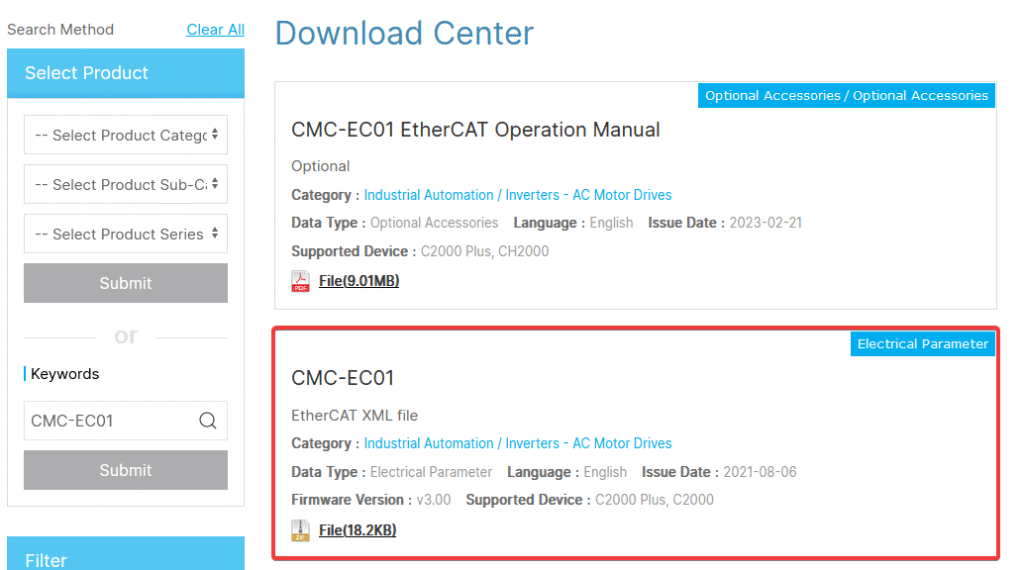
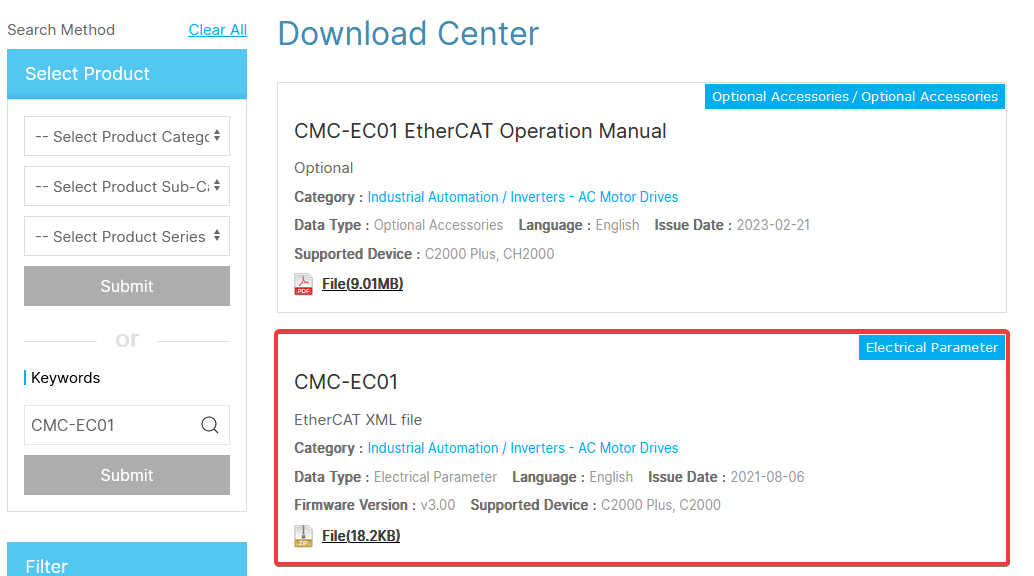
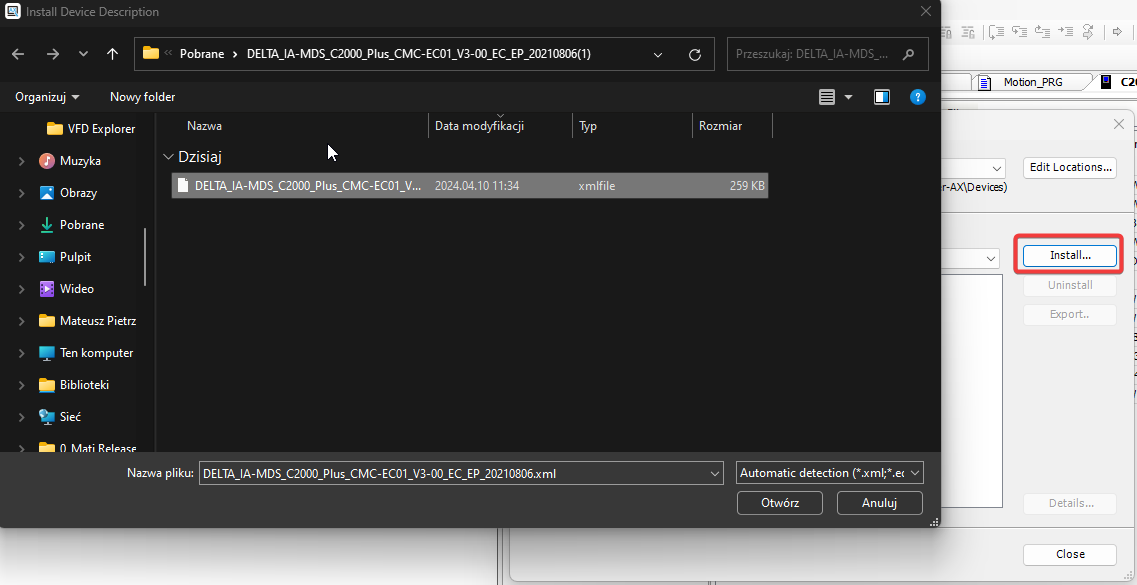
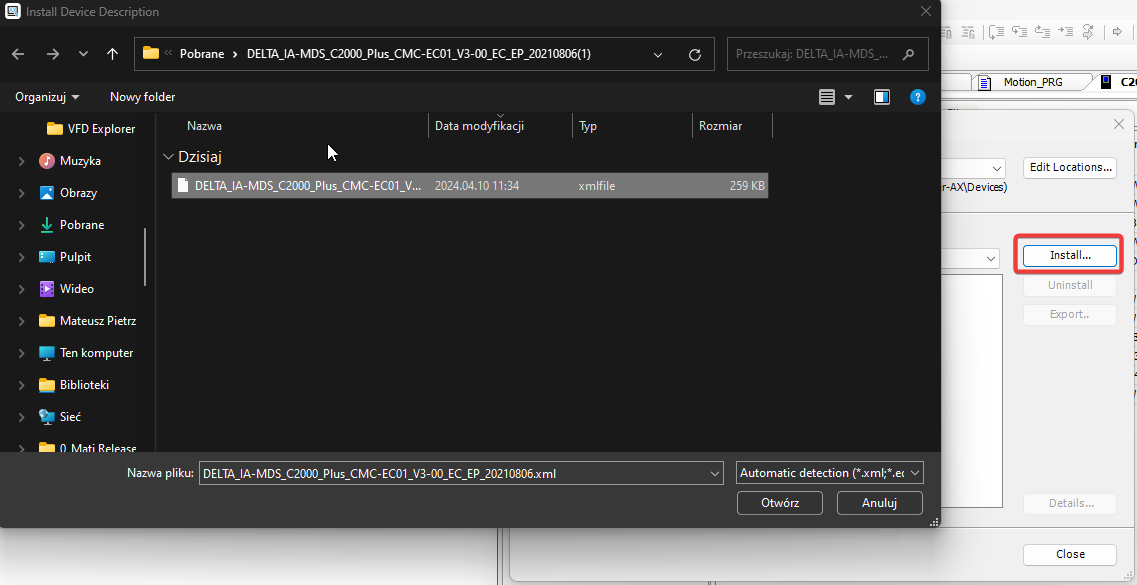
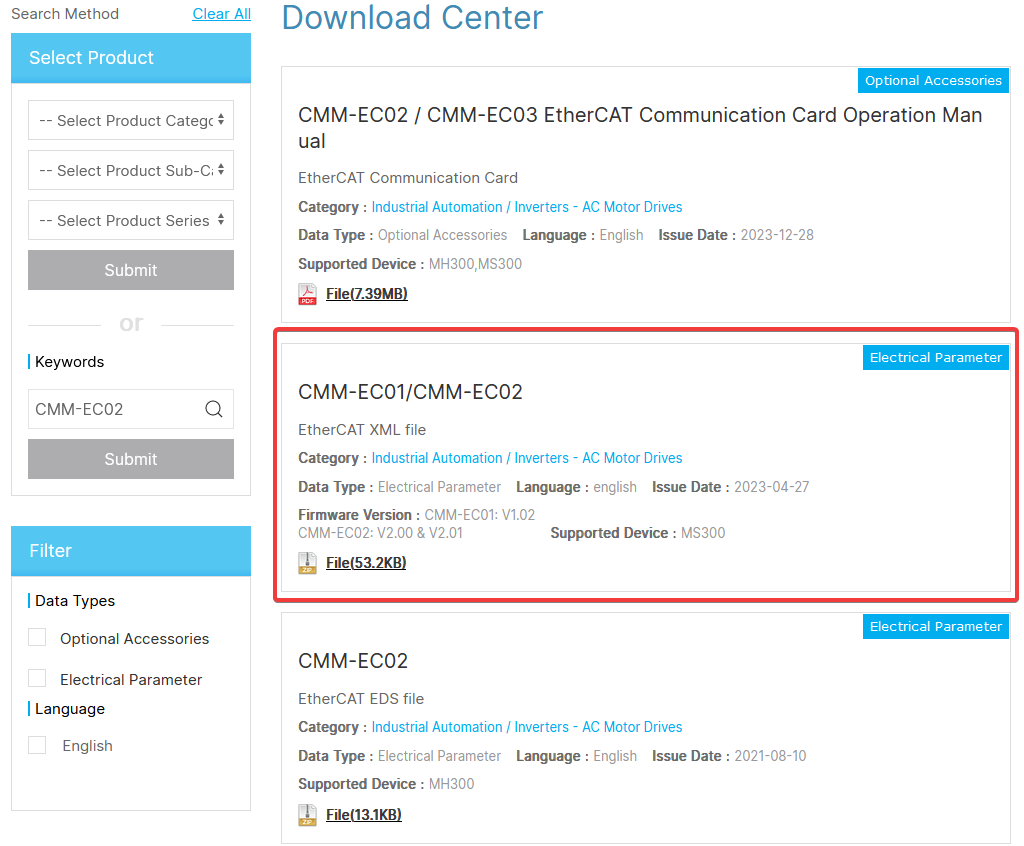
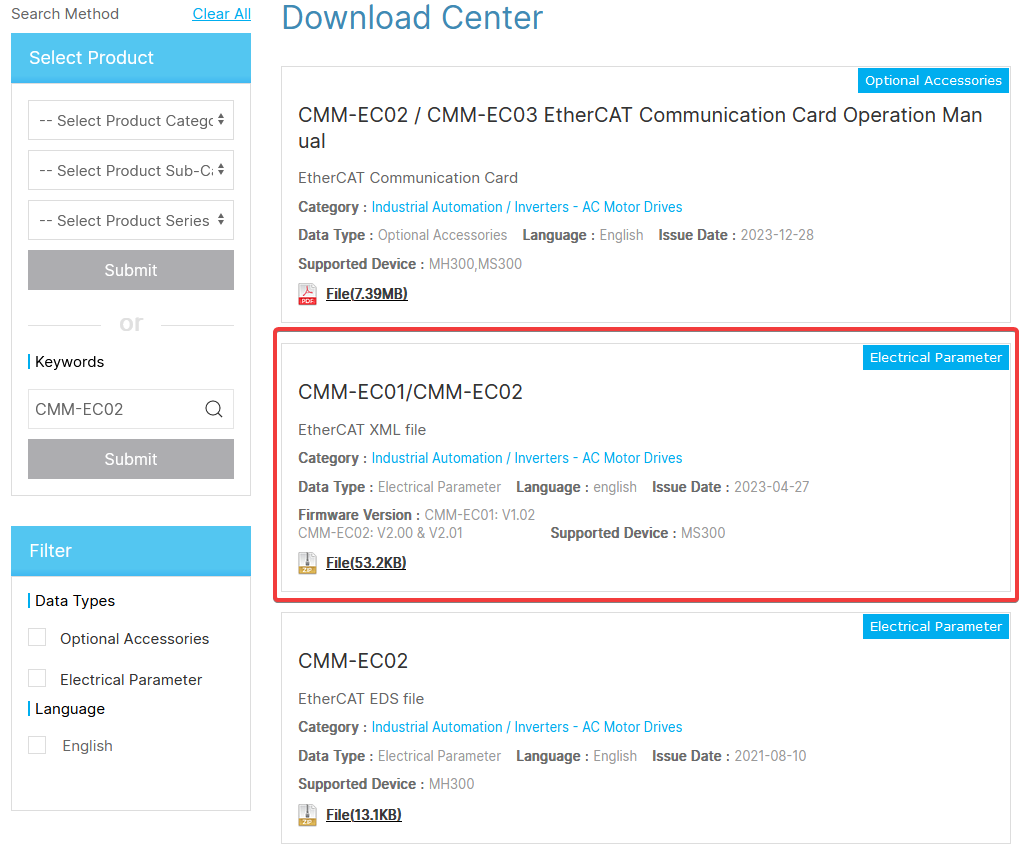
11-40 na 5Pobieramy ze strony Delta Download Center najnowszy plik XML do kart CMC-EC01:
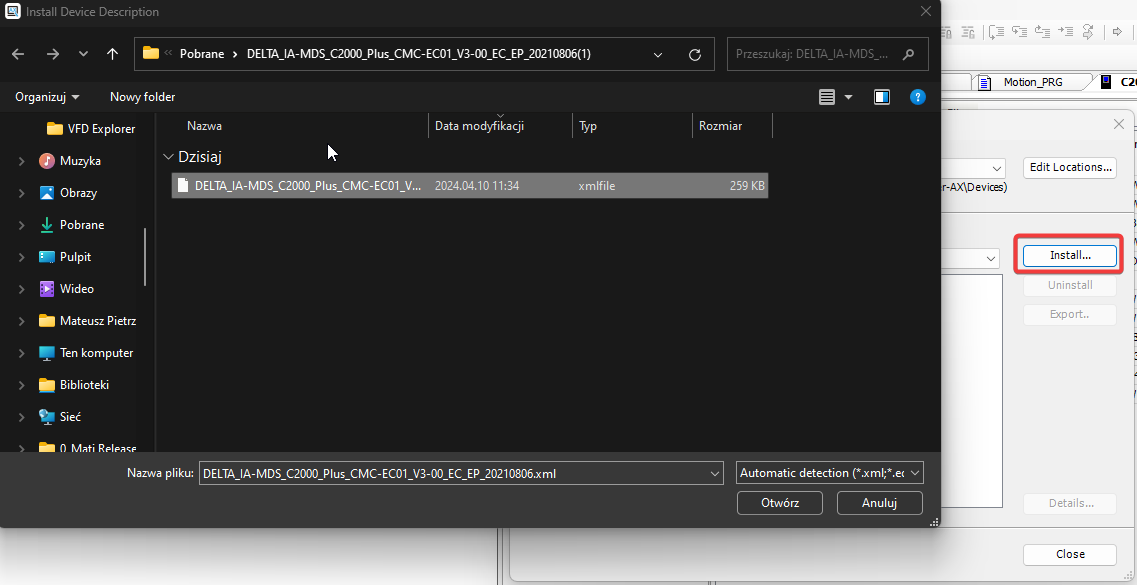
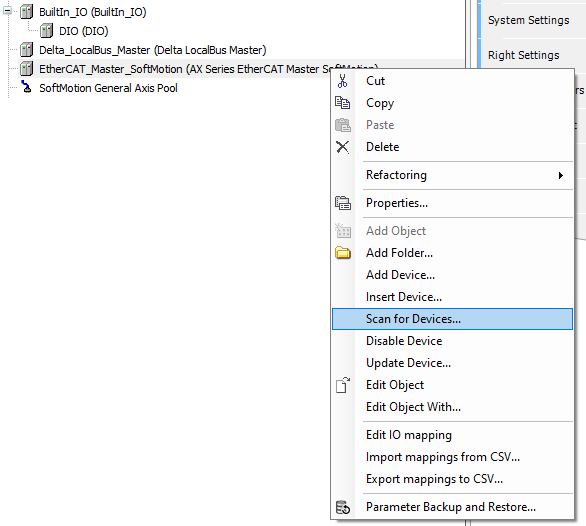
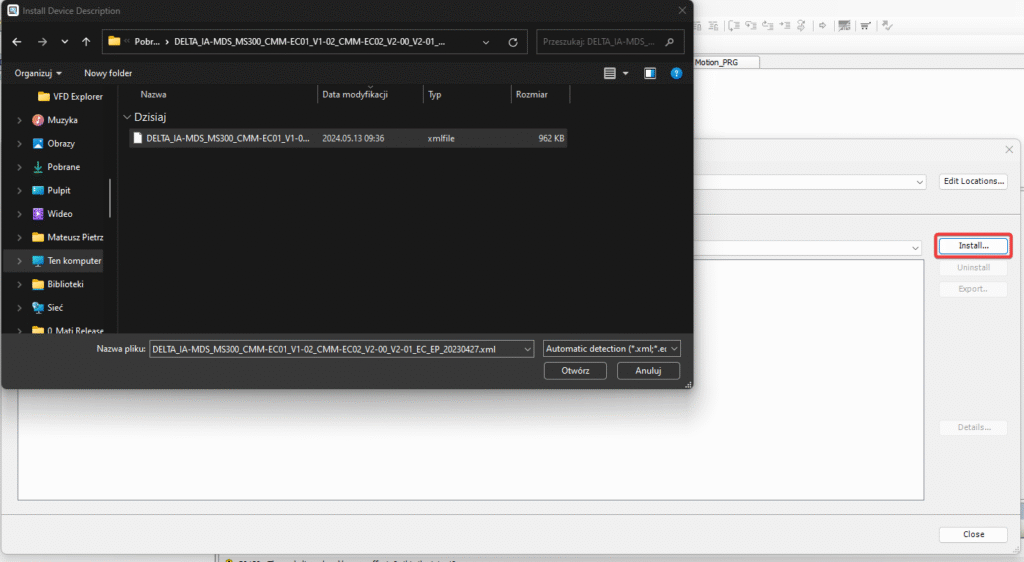
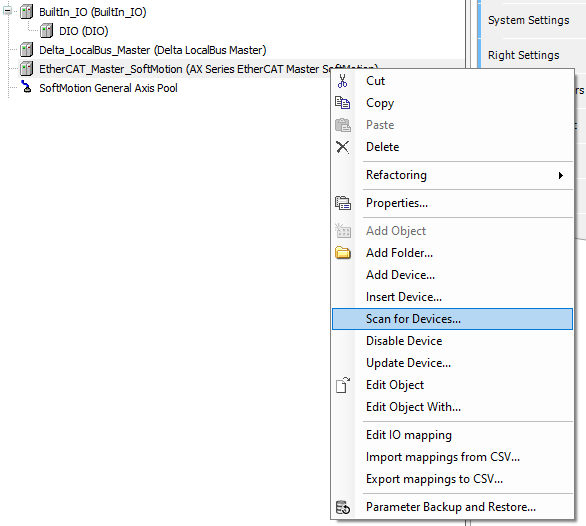
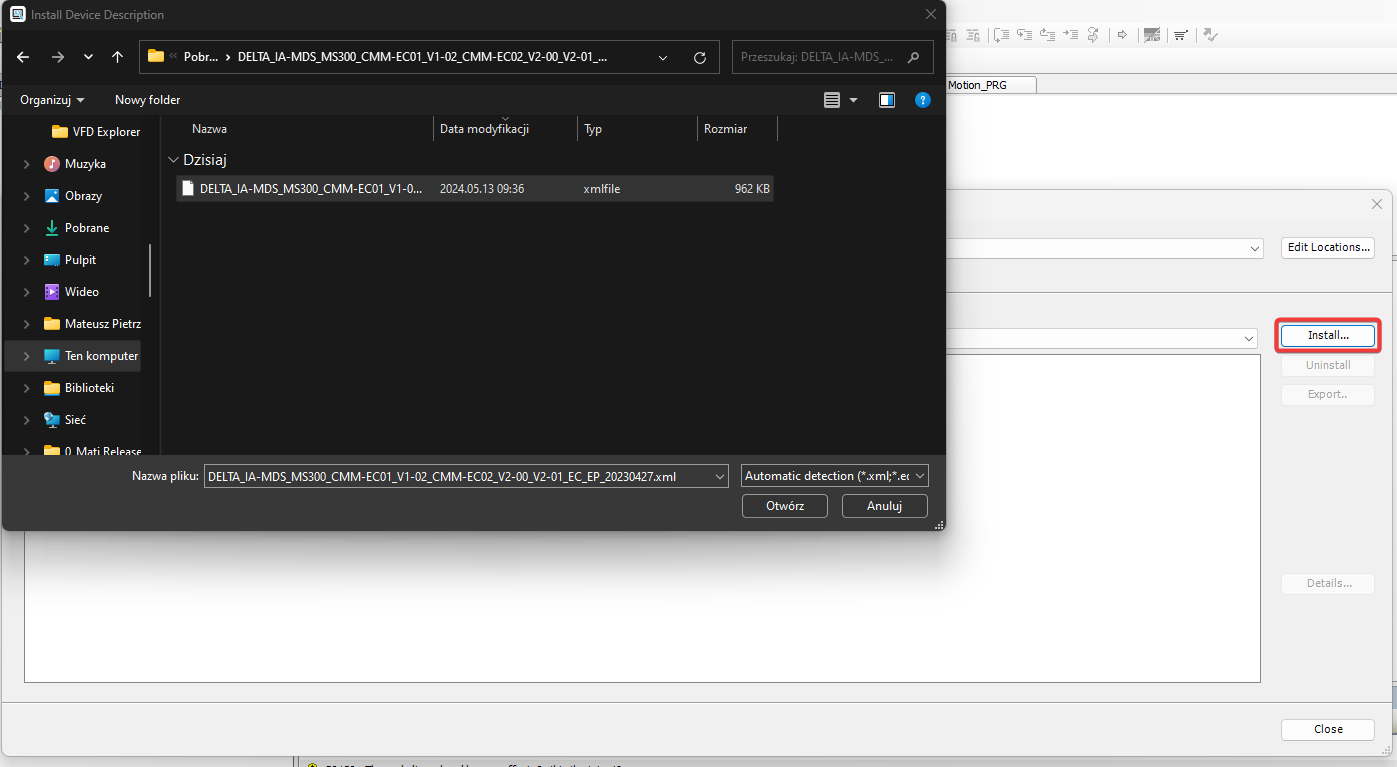
Instalujemy go w DIADesigner-AX. Wchodzimy w Tools -> Device Repository. Klikamy install i wybieramy pobrany plik:
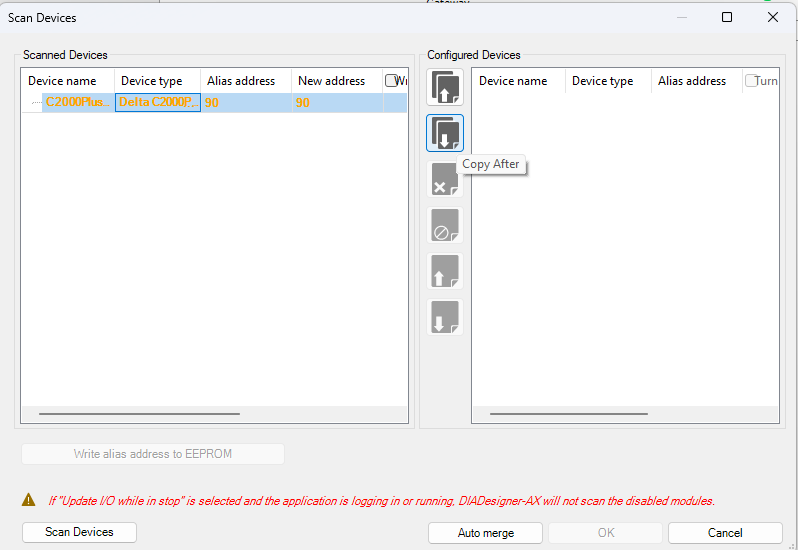
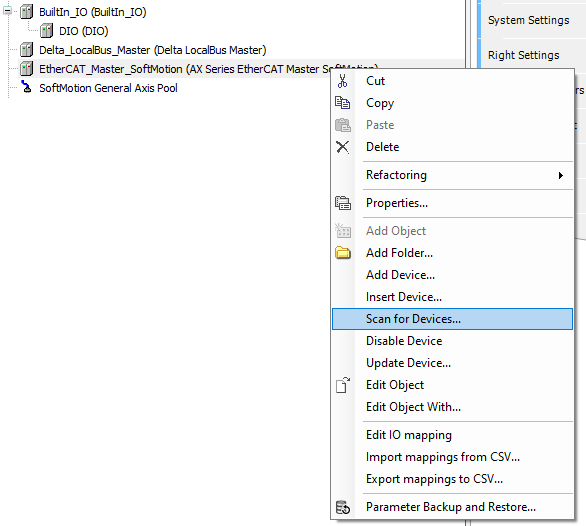
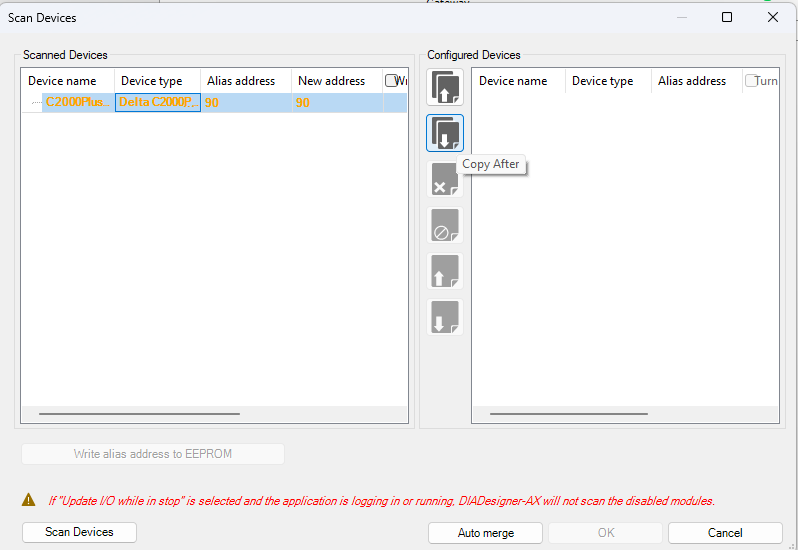
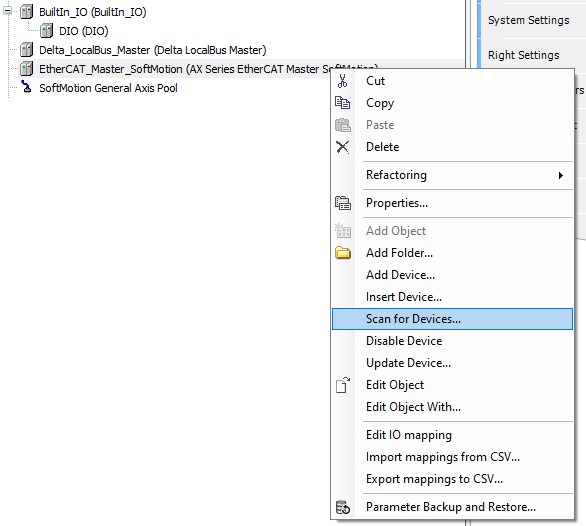
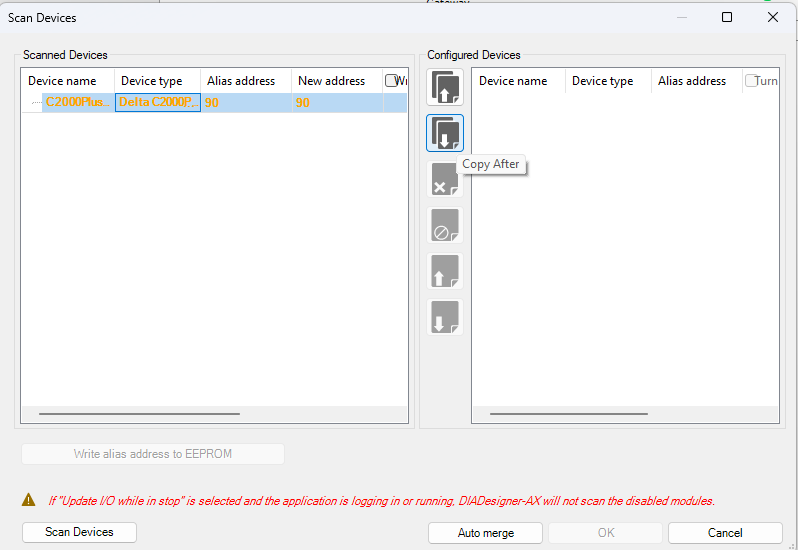
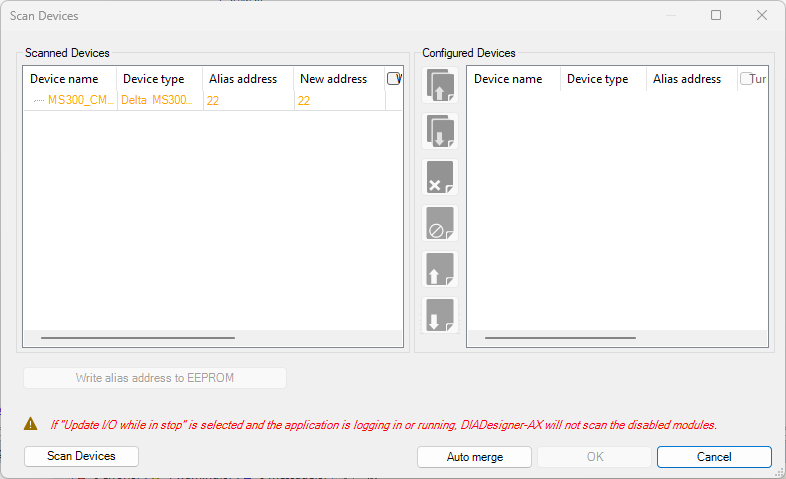
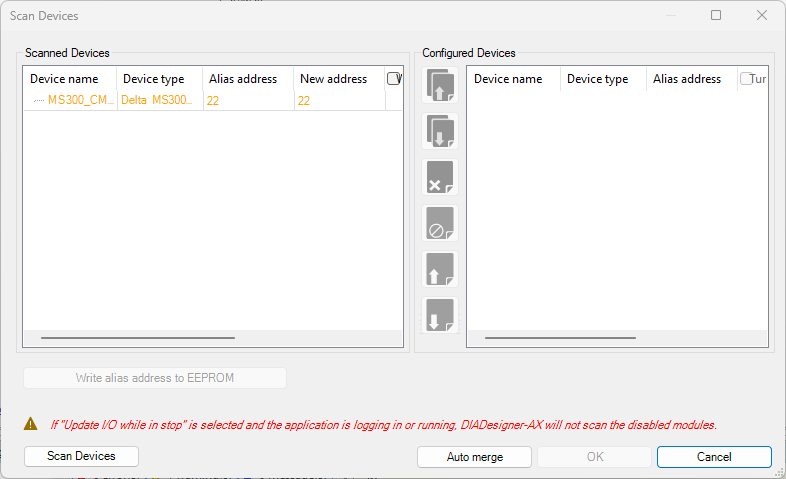
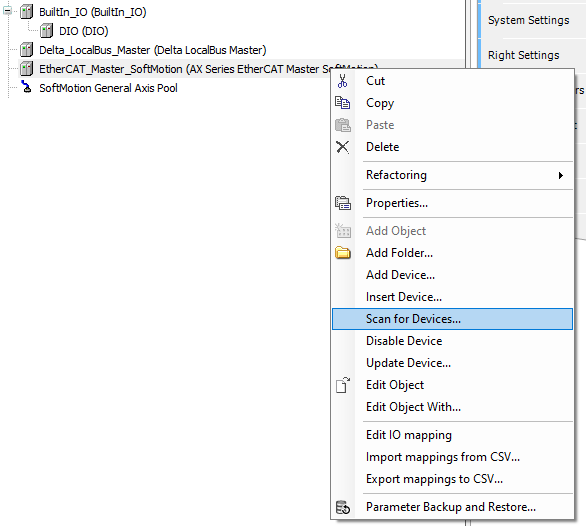
Następnie w DIADesigner-AX skanujemy sieć EtherCAT. Powinien nam się wyszukać nasz falownik, dodajemy go do projektu:
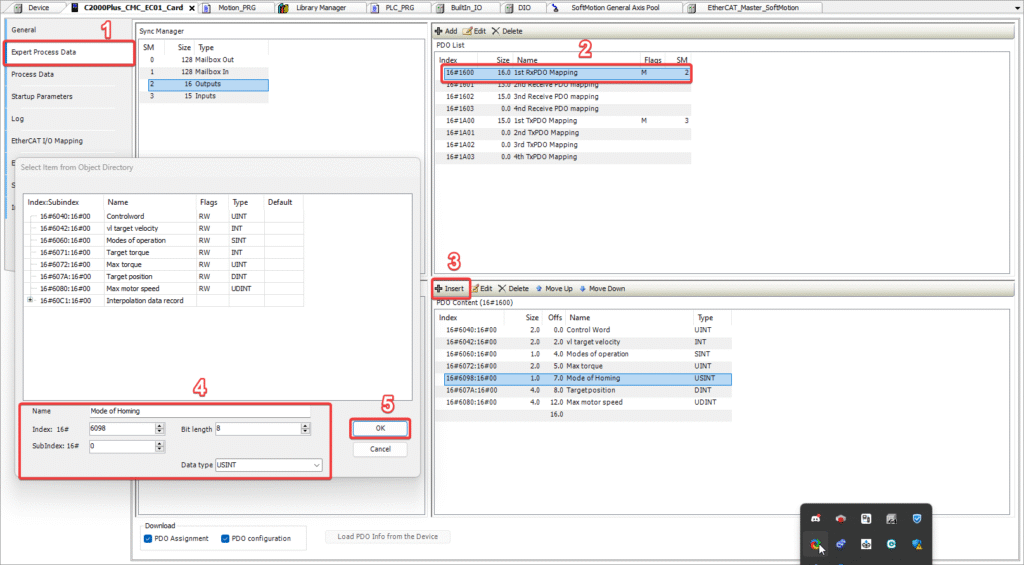
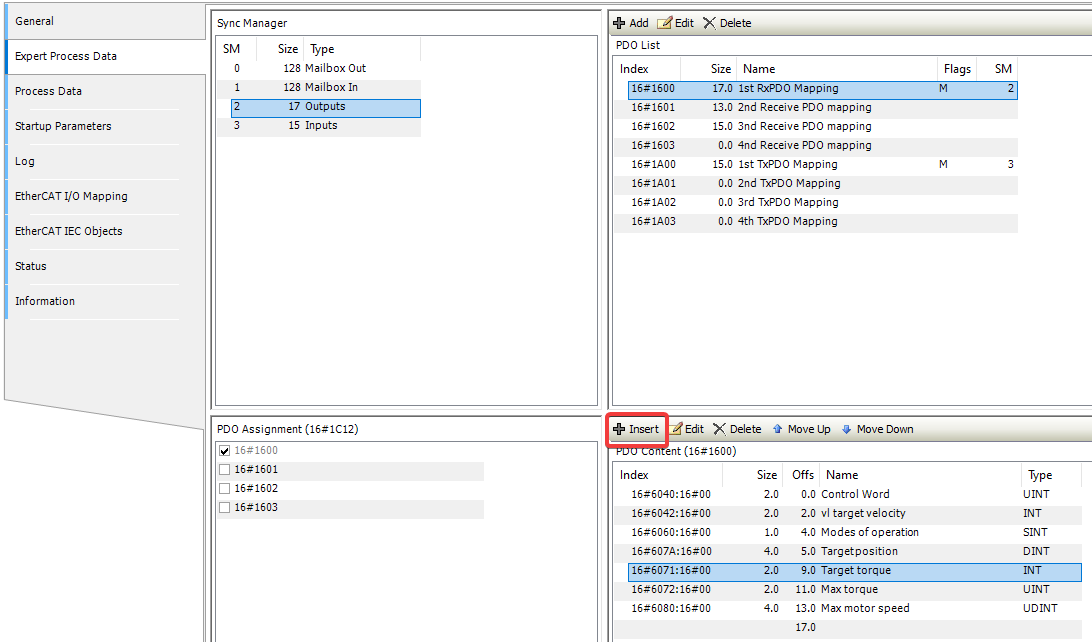
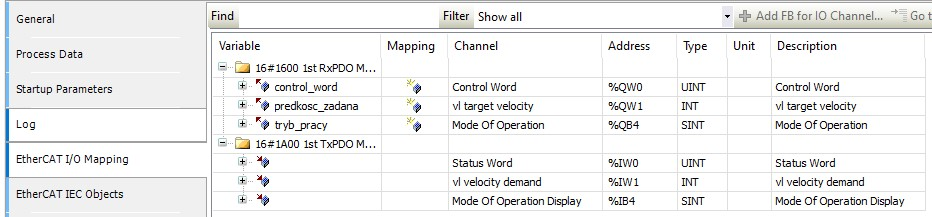
Następnie w zakładce General zaznaczamy Expert settings, przechodzimy do zakładki Expert Proces Data. Tam dla pierwszego RxPDO Mapping, w PDO Content klikamy Insert. Dodajemy indeks według screena:
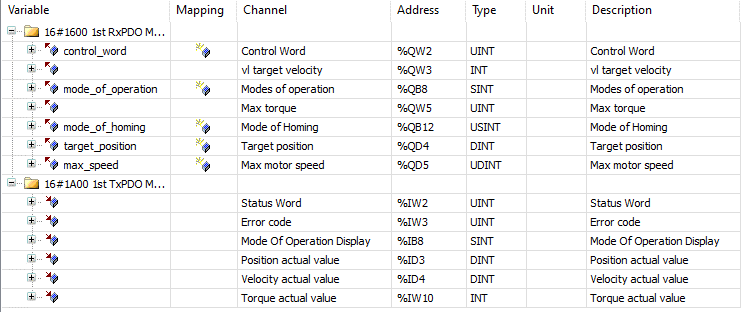
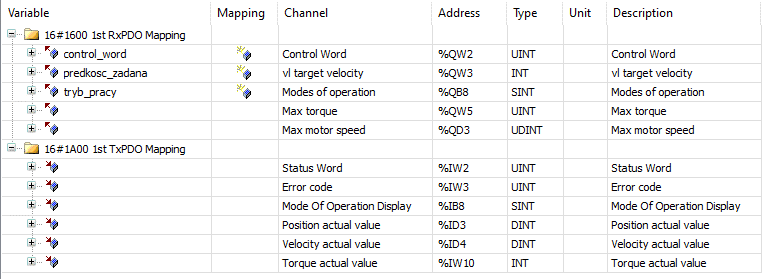
W EtherCAT I/O Mapping mapujemy zmienne:
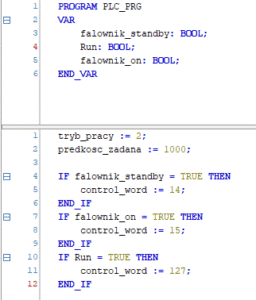
Przykładowy program wygląda w następujący sposób:
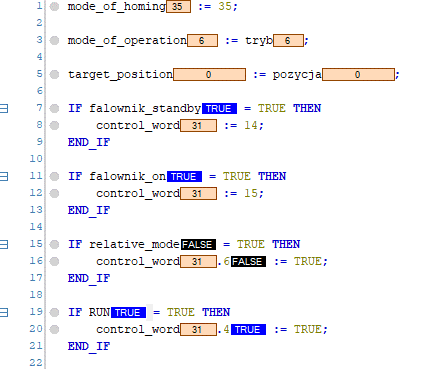
Mode_of_homing: wybieramy odpowiedni tryb bazowania. Dla przykładu wybrałem tryb 35, czyli przyjmij aktualną pozycję za 0.
Tryb wybieramy na początku na 6 (bazowanie) aby zbazować układ. Bez tego nie będziemy w stanie jeździć pozycyjnie.
Aby wykonać bazowanie control word ustawiamy po kolei na wartość 14, 15, oraz załączamy bit 4.
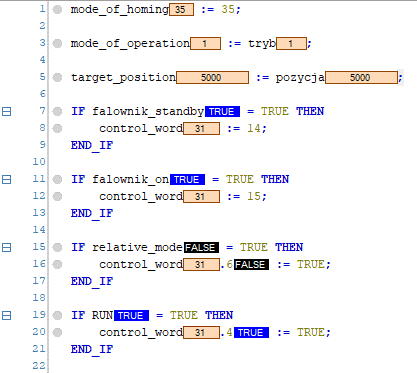
Aby pracować w trybie pozycyjnym ustawiamy tryb na 1. Wpisujemy zadaną pozycję, a następnie aby wywołać ruch wykonujemy tą samą sekwencję co w przypadku bazowania.
Bit 6 odpowiada za jazdę w trybie inkrementalnym lub absolutnym. Jeśli jest załączony to jeździmy inkrementalnie.
Prędkość przejazdu w trybie pozycyjnym definiujemy w indeksie 16#6081. Niestety nie możemy go zmapować do PDO i wartości do niego musimy wpisywać przez SDO. Robi się to w taki sposób:
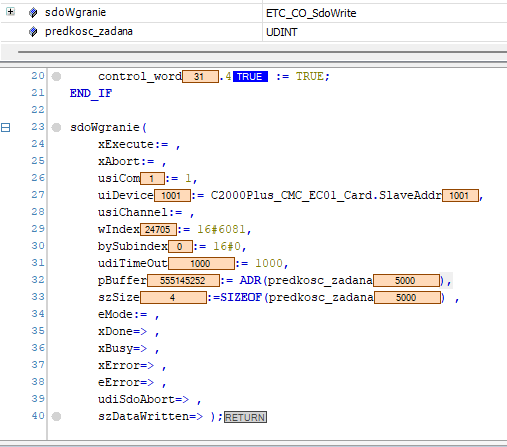
2000 jednostek to 1 Hz.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować EtherCAT w falownikach serii C2000+ w trybie momentowym?
Ustawiamy na falowniku parametry:
01-00, 01-01, 01-02 według tabliczki znamionowej silnika
Następnie przeprowadzamy Auto-tuning silnika (opisany w oddzielnym FAQ)
Następnie ustawiamy parametry:
00-10 na 2 (później i tak nadpisze nam się to komunikacyjnie)
00-13 według tego jaki mamy silnik oraz czy mamy enkoder (dokładny opis parametru w instrukcji)
00-20 na 8
00-21 na 5
09-30, 09-40 na 1
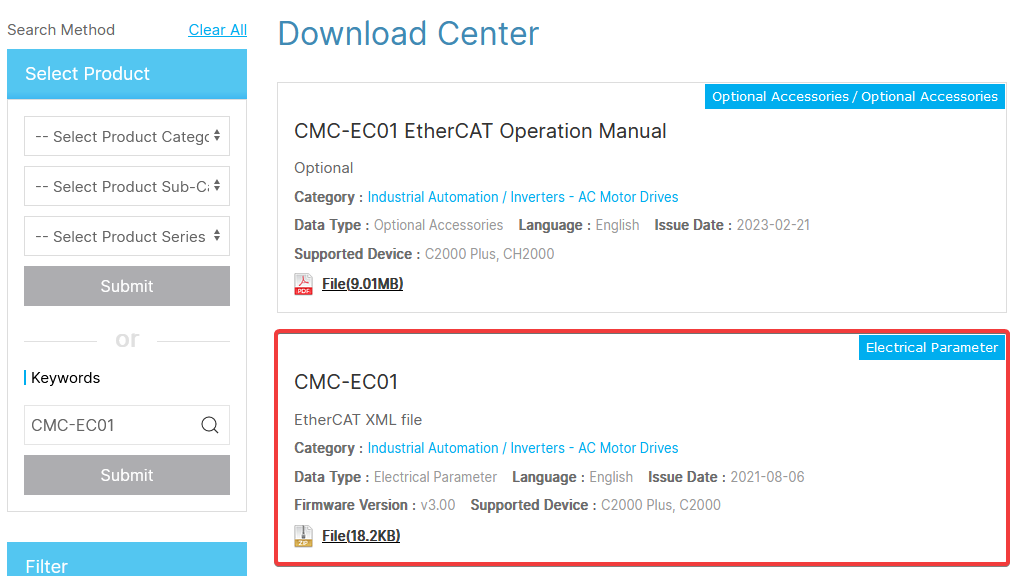
11-33 na 5Pobieramy ze strony Delta Download Center najnowszy plik XML do kart CMC-EC01:
Instalujemy go w DIADesigner-AX. Wchodzimy w Tools -> Device Repository. Klikamy install i wybieramy pobrany plik:
Następnie w DIADesigner-AX skanujemy sieć EtherCAT. Powinien nam się wyszukać nasz falownik, dodajemy go do projektu:
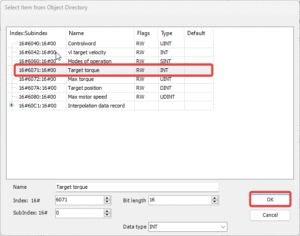
Następnie klikamy na nasz falownik w drzewku projektu, przechodzimy do zakładki General i zaznaczamy opcję Expert Settings. Pojawi nam się wtedy dodatkowa zakładka Expert Process Data. Przechodzimy do niej. Wybieramy 1st RxPDO i a potem w okienku poniżej klikamy Insert. Dodajemy indeks 6071 o nazwie Target torque:
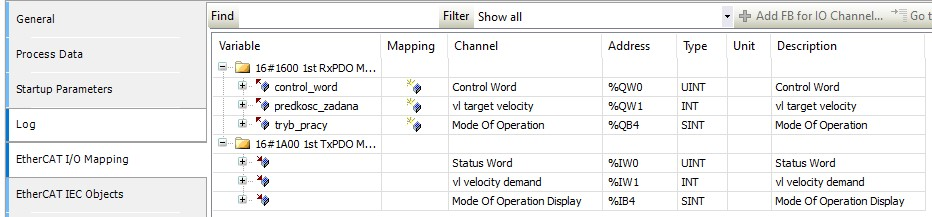
Następnie w zakładce EtherCAT I/O mapping mapujemy zmienne na kanały które są nam potrzebne, jak na obrazku:
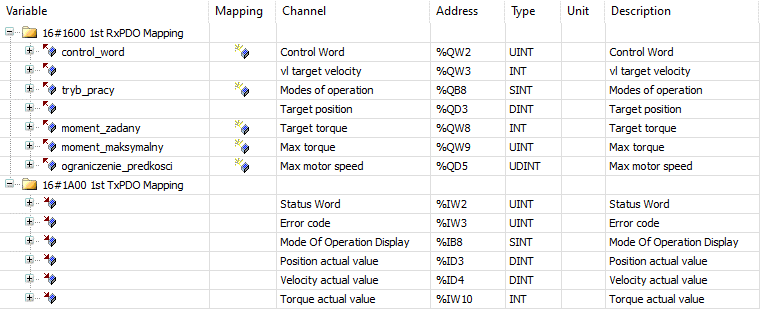
Tryb pracy ustawiamy na 4 (Tryb momentowy). Ograniczenie prędkości podane jest w RPM według tego co mamy ustawione na falowniku. Jeśli nasz silnik przy 50Hz ma 3000RPM, to wpisując tutaj 3000 na ekranie falownika pojawi nam się 50 Hz. Moment maksymalny oraz moment zadany ustawiamy procentowo względem prądu znamionowego falownika. Jednostka to 0,1% czyli 1000 to 100%.
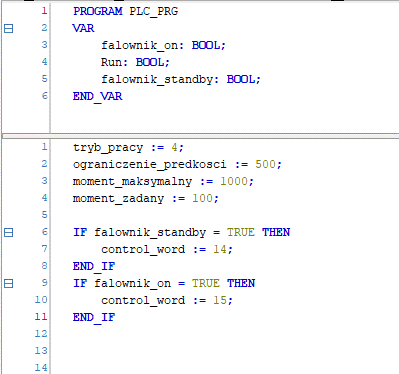
Sekwencja wyzwolenia ruchu wygląda następująco. Najpierw wpisujemy 14 do Control Word aby falownik przeszedł w Standby (Operation Enable), a następnie 15 aby się załączył. Silnik wtedy ruszy i będzie się kręcił zgodnie z ograniczeniem prędkości oraz zadanym momentem.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować EtherCAT w falownikach serii C2000+ w trybie prędkościowym?
Ustawiamy na falowniku parametry:
01-00, 01-01, 01-02 według tabliczki znamionowej silnika
00-10 na 0
00-20 na 8
00-21 na 5
09-30, 09-40 na 1Opcjonalnie:
01-12 – czas przyspieszania
01-13 – czas hamowaniaPobieramy ze strony Delta Download Center najnowszy plik XML do kart CMC-EC01
Instalujemy go w DIADesigner-AX. Wchodzimy w Tools -> Device Repository. Klikamy install i wybieramy pobrany plik.
Następnie w DIADesigner-AX skanujemy sieć EtherCAT. Powinien nam się wyszukać nasz falownik, dodajemy go do projektu.
Następnie wybieramy dodany falownik w drzewku i przechodzimy do zakładki EtherCAT I/O Mapping. Rozwijamy dostępne PDO, a następnie mapujemy na zmienne kanały jak na obrazku.
Zmienne możemy nazwać dowolnie. Przykładowy program sterujący.
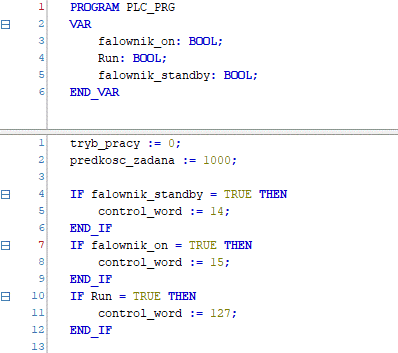
Tryb pracy ustawiamy na 0 (tryb prędkościowy). Prędkość zadana podana jest w RPM według tego co mamy ustawione na falowniku. Jeśli nasz silnik przy 50Hz ma 3000RPM, to wpisując tutaj 3000 na ekranie falownika pojawi nam się 50Hz.
Sekwencja wyzwolenia przejazdu wygląda w następujący sposób. Najpierw musimy wpisać 14 w Control Word aby falownik przeszedł w standby (Operation Enable). Potem 15 aby się załączył. Przejazd wyzwalamy wpisując 127. Aby falownik się zatrzymał musimy z powrotem wpisać 15 (falownik będzie zatrzymywał się zgodnie z ustawioną rampą). Po zatrzymaniu aby wyłączyć obwód mocy wyjściowej falownika należy ustawić Control Word na 14 lub 0.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować EtherCAT w falownikach serii MS300 w trybie momentowym?
Ustawiamy na falowniku parametry:
01-00, 01-01, 01-02 według tabliczki znamionowej silnika
Następnie przeprowadzamy Auto-tuning silnika (opisany w oddzielnym FAQ)Kolejno ustawiamy parametry:
00-10 na 2 (później i tak nadpisze nam się to komunikacyjnie)
00-11 na 2
00-20 na 8
00-21 na 5
09-30, 09-40 na 1
11-33 na 0Pobieramy ze strony Delta Download Center najnowszy plik XML do kart CMM-EC02:
Instalujemy go w DIADesigner-AX. Wchodzimy w Tools -> Device Repository. Klikamy install i wybieramy pobrany plik:
Następnie w DIADesigner-AX skanujemy sieć EtherCAT. Powinien nam się wyszukać nasz falownik, dodajemy go do projektu:
Następnie w zakładce EtherCAT I/O mapping mapujemy zmienne na kanały które są nam potrzebne, jak na obrazku:
Do zadawania momentu będziemy musieli użyć bloku do wysyłania SDO. Wygląda to w taki sposób:
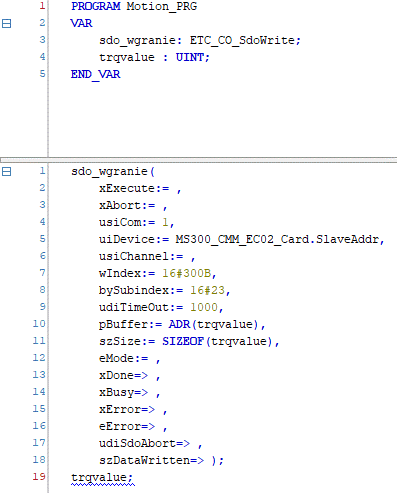
Aby zadać moment musimy do zmiennej trqvalue wpisać wartość ograniczenia (jednostka 0.1%), a następnie wywołać ten blok przez wejście xExecute.
Przykładowy program obsługujący pracę falownika wygląda tak: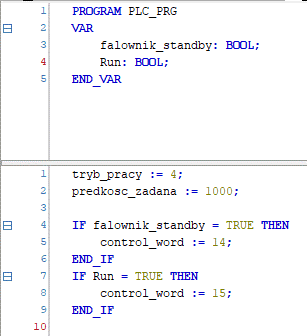
Tryb pracy ustawiany jest na 4, czyli tryb momentowy. Prędkość zadana jest ograniczeniem prędkości w trybie momentowym. Procedura wyzwolenia przejazdu jest następująca. Do control word należy wpisać 14 aby falownik przeszedł w Standby, a następnie 15 aby wystartował. Jeśli chcemy zatrzymać falownik należy ponownie wpisać 14.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować EtherCAT w falownikach serii MS300 w trybie prędkościowym?
Ustawiamy na falowniku parametry:
01-00, 01-01, 01-02 według tabliczki znamionowej silnika
Jeśli chcemy jeździć w trybie wektorowym przeprowadzamy Auto-tuning silnika (opisany w oddzielnym FAQ)Kolejno ustawiamy parametry:
00-10 na 0 (później i tak nadpisze nam się to komunikacyjnie)
00-11 na 2 (opcjonalnie – tryb wektorowy)
00-20 na 8
00-21 na 5
09-30, 09-40 na 1Pobieramy ze strony Delta Download Center najnowszy plik XML do kart CMM-EC02
Instalujemy go w DIADesigner-AX. Wchodzimy w Tools -> Device Repository. Klikamy install i wybieramy pobrany plik.
Następnie w DIADesigner-AX skanujemy sieć EtherCAT. Powinien nam się wyszukać nasz falownik, dodajemy go do projektu.
Następnie w zakładce EtherCAT I/O mapping mapujemy zmienne na kanały które są nam potrzebne, jak na obrazku.
Przykładowy program obsługujący pracę falownika wygląda tak:
Tryb pracy ustawiany jest na 2, czyli tryb prędkościowy. Prędkość zadajemy w jednostkach RPM. Procedura wyzwolenia przejazdu jest następująca. Do control word należy wpisać 14 aby falownik przeszedł w Standby, a następnie 15 aby się „załączył”. Aby wyzwolić przejazd należy do control word wpisać 127. Jeśli chcemy zatrzymać falownik do control word wpisujemy 15.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować podstawowe parametry falowników serii MS300?
1. Źródło częstotliwości zadanej – parametr 00-20
Za źródło częstotliwości zadanej odpowiada parametr 00-20. Domyślnie wybrana jest klawiatura czyli wartość 0.
Dostępne opcje do wyboru:
- Klawiatura
- Port szeregowy RS-485
- Wejście analogowe
- Zewnętrzne przyciski +/-
- Wejście impulsowe bez komendy kierunku
- Karta komunikacyjna CANopen
- Potencjometr na panelu
- Karta komunikacyjna inna niż CANopen
- Regulator PID
2. Źródło komend ruchu – parametr 00-21
Za źródło komend ruchu (start, stop, kierunek) odpowiada parametr 00-21. Domyślnie komendy zadawane są z klawiatury (wartość 0 ). Źródła do wyboru:0.Klawiatura.
1.Wejścia cyfrowe.
2. Port szeregowy RS-485.
3.Karta komunikacyjna CANopen
5.Karta komunikacyjna inna niż CANopen
3. Rampy przyspieszania oraz hamowania – parametry 01-12, 01-13
Za ustawienie czasów przyspieszania oraz hamowania odpowiadają kolejno parametry 01-12 oraz
01-13. Domyślnie obydwie wartości ustawione są na 10.00 sekund. Dostępny zakres wartości: 0 – 600 sekund, lub jeżeli ustawimy parametr 01-45 na 1, to wtedy maksymalny zakres wyniesie: 0 – 6000 sekund.
4. Podstawowe parametry silnika – parametry 01-00, 01-01, 01-02
- Maksymalna częstotliwość zadana w parametrze 01-00. Domyślnie ustawiona jest wartość 50.00 Hz Dostępny jest zakres wartości 0-599 Hz.
- Znamionowa częstotliwość silnika w parametrze 01-01. Domyślnie ustawiona jest wartość 50.00 Hz. Dostępny zakres wartości to 0 – 599 Hz.
- Znamionowe napięcie silnika w parametrze 01-02. Domyślnie ustawiona jest wartość 220.0 V dla modeli 115V/ 230V. Dostępny zakres wartości dla
tych modeli to: 0 – 255V
5. Sterowanie skalarne U/F z klawiatury – parametr 00-11
Przemiennik częstotliwości będzie sterować napędem w trybie prędkościowym. Źródłem częstotliwości oraz komend START/STOP będzie wbudowana klawiatura. Parametry przemiennika częstotliwości są ustawione domyślnie w takim trybie pracy.
Parametry:
- Sterowanie U/F, parametr 00-11 ustawiamy na 0, domyślnie ustawione jest 0
czyli tryb skalarny - Źródło częstotliwości, parametr 00-20 ustawiamy na 0 czyli źródło z klawiatury, domyślnie ustawiona jest klawiatura
- Źródło komend ruchu, parametr 00-21 ustawiamy na 0 czyli klawiatura, domyślnie ustawiona jest klawiatura
Zmianę częstotliwości dokonujemy strzałkami góra/dół w momencie gdy na panelu wyświetla się F. Falownik uruchamiamy przyciskiem RUN.
6. Sterowanie wektorowe i autotuning silnika IM (indukcyjnego) ) – parametry: od 01-00 do 01-02 oraz od 05-00 do 05-04
W celu uruchomienia falownika w trybie wektorowym IMFOC, w pierwszej kolejności musimy wykonać autotuning silnika. Przed przystąpieniem do Autotuningu zalecamy przywrócić falownik do ustawień fabrycznych.
Do wykonania autotuning potrzebne są parametry silnika z tabliczki znamionowej.
Uzupełniamy parametry w falowniku:- Maksymalna częstotliwość zadana (domyślnie 50.00 Hz) w parametrze 01-00.
- Znamionowa częstotliwość silnika (domyślnie 50.00 Hz) w parametrze 01-01.
- Znamionowe napięcie silnika (domyślnie 220.0V) parametr 01-02.
- Znamionowy prąd silnika w parametrze 05-01.
- Znamionowa moc silnika w jednostce kW w parametrze 05-02.
- Znamionowa ilość biegunów silnika (nie pary biegunów) w parametrze 05-04.
- Znamionowa prędkość obrotowa silnika w obr/min w parametrze 05-03.
Po uzupełnianiu tych parametrów możemy wykonać autotuning silnika. Mamy dwie możliwości: autotuning statyczny czyli jeżeli silnik podłączony jest już do obciążenia lub autotuning dynamiczny czyli w sytuacji kiedy silnik nie jest podłączony do obciążenia i wałek może swobodnie się obracać
Wyboru trybu autotuningu dokonujemy w parametrze 05-00. Wpisujemy albo wartość 1 czyli autotuning dynamiczny lub wartość 2 czyli autotuning statyczny. Następnie uruchomiamy falownik komendą „RUN” i czekamy na zakończenie autotuningu. Po zakończeniu autotuningu należy zresetować zasilanie falownika i sprawdzić czy zostały wpisane wartości do parametrów od 05-06 do 05-09.
Po sprawdzeniu możemy uruchomić tryb wektorowy (IMFOC) w parametrze 00-11 wpisując w nim wartość 5.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
Ostatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować podstawowe parametry falowników serii CFP2000
1. Źródło częstotliwości zadanej – parametr 00-20
Za źródło częstotliwości zadanej odpowiada parametr 00-20. Domyślnie wybrana jest klawiatura czyli wartość 0.
Dostępne opcje do wyboru:
0. Klawiatura
1. Port szeregowy RS-485
2. Wejście analogowe
3. Zewnętrzne przyciski +/-
6. Karta komunikacyjna CANopen
8. Karta komunikacyjna inna niż CANopen
2. Źródło komend ruchu – 00-21
Za źródło komend ruchu (start, stop, kierunek) odpowiada parametr 00-21. Domyślnie komendy zadawane są z klawiatury (wartość 0 ). Źródła do wyboru:0. Klawiatura.
1. Wejścia cyfrowe.
2. Port szeregowy RS-485.
3. Karta komunikacyjna CANopen
5. Karta komunikacyjna inna niż CANopen
3. Ramy przyspieszania oraz hamowania – parametry 01-12, 01-13
Za ustawienie czasów przyspieszania oraz hamowania odpowiadają kolejno parametry 01-12 oraz
01-13. Domyślnie obydwie wartości ustawione są na 10.00 sekund. Dostępny zakres wartości: 0 – 600 sekund, lub jeżeli ustawimy parametr 01-45 na 1, to wtedy maksymalny zakres wyniesie: 0 – 6000 sekund. Falowniki większej mocy mogą mieć ustawioną większą rampę niż 10.00 sekund.
4. Podstawowe parametry silnika – parametr 01-00, 01-01, 01-02
- Maksymalna częstotliwość zadana w parametrze 01-00. Domyślnie ustawiona jest wartość 50.00 Hz Dostępny jest zakres wartości 0-599 Hz. Dla mocy większej lub równej 45 kW zakres od 0 do 400 Hz.
- Znamionowa częstotliwość silnika w parametrze 01-01. Domyślnie ustawiona jest wartość 50.00 Hz. Dostępny zakres wartości to 0 – 599 Hz.
- Znamionowe napięcie silnika w parametrze 01-02. Domyślnie ustawiona jest wartość 200.0 V dla modeli 230V. Dla innych modeli napięcia wartość ta będzie wyższa.
5. Sterowanie skalarne U/F z klawiatury – parametr 00-11
PrzPrzemiennik częstotliwości będzie sterować napędem w trybie prędkościowym. Źródłem częstotliwości oraz komend START/STOP będzie wbudowana klawiatura. Parametry przemiennika częstotliwości są ustawione domyślnie w takim trybie pracy.
Parametry:
- Sterowanie U/F, parametr 00-11 ustawiamy na 0, domyślnie ustawione jest 0
czyli tryb skalarny - Źródło częstotliwości, parametr 00-20 ustawiamy na 0 czyli źródło z klawiatury, domyślnie ustawiona jest klawiatura
- Źródło komend ruchu, parametr 00-21 ustawiamy na 0 czyli klawiatura, domyślnie ustawiona jest klawiatura
Zmianę częstotliwości dokonujemy strzałkami góra/dół w momencie gdy na panelu wybrana jest wartość poprzedzona literą „F”. Falownik uruchamiamy przyciskiem RUN.
6. Sterowanie wektorowe i autotuning silnika IM (indukcyjnego) – parametry: od 01-00 do 01-02 oraz od 05-00 do 05-04
W celu uruchomienia falownika w trybie wektorowym SVC, w pierwszej kolejności musimy wykonać autotuning silnika. Przed przystąpieniem do Autotuningu zalecamy przywrócić falownik do ustawień fabrycznych. Do wykonania autotuning potrzebne są parametry silnika z tabliczki znamionowej.
Uzupełniamy parametry w falowniku:- Maksymalna częstotliwość zadana (domyślnie 50.00 Hz) w parametrze 01-00.
- Znamionowa częstotliwość silnika (domyślnie 50.00 Hz) w parametrze 01-01.
- Znamionowe napięcie silnika (domyślnie 220.0V) parametr 01-02.
- Znamionowy prąd silnika (jednostka: ampery) w parametrze 05-01.
- Znamionowa moc silnika (w jednostce kW) w parametrze 05-02.
- Znamionowa ilość biegunów silnika (nie pary biegunów) w parametrze 05-04.
- Znamionowa prędkość obrotowa silnika (w obr/min) w parametrze 05-03.
Po uzupełnianiu tych parametrów możemy wykonać autotuning silnika. Mamy dwie możliwości: autotuning statyczny czyli jeżeli silnik podłączony jest już do obciążenia lub autotuning dynamiczny czyli w sytuacji kiedy silnik nie jest podłączony do obciążenia i wałek może swobodnie się obracać
Wyboru trybu autotuningu dokonujemy w parametrze 05-00. Wpisujemy albo wartość 1 czyli autotuning dynamiczny lub wartość 2 czyli autotuning statyczny. Następnie uruchomiamy falownik komendą „RUN” i czekamy na zakończenie autotuningu. Po zakończeniu autotuningu należy zresetować zasilanie falownika i sprawdzić czy zostały wpisane wartości do parametrów od 05-06 do 05-09. Po sprawdzeniu możemy uruchomić tryb wektorowy (SVC) w parametrze 00-11 wpisując w nim wartość 2.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
Ostatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować podstawowe parametry falowników serii C2000+
1. Źródło częstotliwości zadanej – parametr 00-20
Za źródło częstotliwości zadanej odpowiada parametr 00-20. Domyślnie wybrana jest klawiatura czyli wartość 0.
Dostępne opcje do wyboru:
0. Klawiatura
1. Port szeregowy RS-485
2. Wejście analogowe
3. Zewnętrzne przyciski +/-
4. Wejście impulsowe bez komendy kierunku
5. Wejście impulsowe z komendą kierunku
6. Karta komunikacyjna CANopen
8. Karta komunikacyjna inna niż CANopen
2. Źródło komend ruchu – parametr 00-21
Za źródło komend ruchu (start, stop, kierunek) odpowiada parametr 00-21. Domyślnie komendy zadawane są z klawiatury (wartość 0 ). Źródła do wyboru:0. Klawiatura.
1. Wejścia cyfrowe.
2. Port szeregowy RS-485.
3. Karta komunikacyjna CANopen
5. Karta komunikacyjna inna niż CANopen
3. Ramy przyspieszania oraz hamowania – parametry 01-12, 01-13
Za ustawienie czasów przyspieszania oraz hamowania odpowiadają kolejno parametry 01-12 oraz
01-13. Domyślnie obydwie wartości ustawione są na 10.00 sekund. Dostępny zakres wartości: 0 – 600 sekund, lub jeżeli ustawimy parametr 01-45 na 1 to wtedy maksymalny zakres wyniesie: 0 – 6000 sekund. Falowniki większej mocy mogą mieć ustawioną większą rampę niż 10.00 sekund.
4. Podstawowe parametry silnika – parametry 01-00, 01-01, 01-02
- Maksymalna częstotliwość zadana w parametrze 01-00. Domyślnie ustawiona jest wartość 50.00 Hz Dostępny jest zakres wartości 0-599 Hz.
- Znamionowa częstotliwość silnika w parametrze 01-01. Domyślnie ustawiona jest wartość 50.00 Hz. Dostępny zakres wartości to 0 – 599 Hz.
- Znamionowe napięcie silnika w parametrze 01-02. Domyślnie ustawiona jest wartość 200.0 V dla modeli 230V. Dostępny zakres wartości dla tych modeli to: 0 – 255V. W zależności od napięcia zasilania, domyślna nastawa będzie adekwatnie wyższa.
5. Sterowanie skalarne U/F z klawiatury – parametr 00-11
Przemiennik częstotliwości będzie sterować napędem w trybie prędkościowym. Źródłem częstotliwości oraz komend START/STOP będzie wbudowana klawiatura. Parametry przemiennika częstotliwości są ustawione domyślnie w takim trybie pracy.
Parametry:
- Sterowanie U/F, parametr 00-11 ustawiamy na 0, domyślnie ustawione jest 0
czyli tryb skalarny - Źródło częstotliwości, parametr 00-20 ustawiamy na 0 czyli źródło z klawiatury, domyślnie ustawiona jest klawiatura
- Źródło komend ruchu, parametr 00-21 ustawiamy na 0 czyli klawiatura, domyślnie ustawiona jest klawiatura
Zmianę częstotliwości dokonujemy strzałkami góra/dół w momencie gdy na panelu wybrana jest wartość poprzedzona literą „F”. Falownik uruchamiamy przyciskiem RUN.
6. Sterowanie wektorowe i autotuning silnika IM (indukcyjnego) – parametry: od 01-00 do 01-02 oraz od 05-00 do 05-04
W celu uruchomienia falownika w trybie wektorowym IMFOC, w pierwszej kolejności musimy wykonać autotuning silnika. Przed przystąpieniem do Autotuningu zalecamy przywrócić falownik do ustawień fabrycznych.
Do wykonania autotuning potrzebne są parametry silnika z tabliczki znamionowej.
Uzupełniamy parametry w falowniku:- Maksymalna częstotliwość zadana (domyślnie 50.00 Hz) w parametrze 01-00.
- Znamionowa częstotliwość silnika (domyślnie 50.00 Hz) w parametrze 01-01.
- Znamionowe napięcie silnika (domyślnie 220.0V) parametr 01-02.
- Znamionowy prąd silnika (jednostka: ampery) w parametrze 05-01.
- Znamionowa moc silnika w jednostce kW w parametrze 05-02.
- Znamionowa ilość biegunów silnika (nie pary biegunów) w parametrze 05-04.
- Znamionowa prędkość obrotowa silnika w obr/min w parametrze 05-03.
Po uzupełnianiu tych parametrów możemy wykonać autotuning silnika. Mamy dwie możliwości: autotuning statyczny czyli jeżeli silnik podłączony jest już do obciążenia lub autotuning dynamiczny czyli w sytuacji kiedy silnik nie jest podłączony do obciążenia i wałek może swobodnie się obracać
Wyboru trybu autotuningu dokonujemy w parametrze 05-00. Wpisujemy albo wartość 1 czyli autotuning dynamiczny lub wartość 2 czyli autotuning statyczny. Następnie uruchomiamy falownik komendą „RUN” i czekamy na zakończenie autotuningu. Po zakończeniu autotuningu należy zresetować zasilanie falownika i sprawdzić czy zostały wpisane wartości do parametrów od 05-06 do 05-09.
Po sprawdzeniu możemy uruchomić tryb wektorowy (IMFOC) w parametrze 00-11 wpisując w nim wartość 5.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
Ostatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować podstawowe parametry falowników serii C2000?
1. Źródło częstotliwości zadanej – parametr 00-20
Za źródło częstotliwości zadanej odpowiada parametr 00-20. Domyślnie wybrana jest klawiatura czyli wartość 0.
Dostępne opcje do wyboru:
0. Klawiatura
1. Port szeregowy RS-485
2. Wejście analogowe
3. Zewnętrzne przyciski +/-
4. Wejście impulsowe bez komendy kierunku
5. Wejście impulsowe z komendą kierunku
6. Karta komunikacyjna CANopen
8. Karta komunikacyjna inna niż CANopen
2. Źródło komend ruchu – parametr 00-21
Za źródło komend ruchu (start, stop, kierunek) odpowiada parametr 00-21. Domyślnie komendy zadawane są z klawiatury (wartość 0 ). Źródła do wyboru:0. Klawiatura.
1. Wejścia cyfrowe.
2. Port szeregowy RS-485.
3. Karta komunikacyjna CANopen
5. Karta komunikacyjna inna niż CANopen
3. Ramy przyspieszania oraz hamowania – parametry 01-12, 01-13
Za ustawienie czasów przyspieszania oraz hamowania odpowiadają kolejno parametry 01-12 oraz 01-13. Domyślnie obydwie wartości ustawione są na 10.00 sekund. Dostępny zakres wartości: 0 – 600 sekund, lub jeżeli ustawimy parametr
01-45 na 1, to wtedy maksymalny zakres wyniesie: 0 – 6000 sekund. Falowniki większej mocy mogą mieć ustawioną większą rampę niż 10.00 sekund.
4. Podstawowe parametry silnika – parametry 01-00, 01-01, 01-02
- Maksymalna częstotliwość zadana w parametrze 01-00. Domyślnie ustawiona jest wartość 50.00 Hz Dostępny jest zakres wartości 0-599 Hz.
- Znamionowa częstotliwość silnika w parametrze 01-01. Domyślnie ustawiona jest wartość 50.00 Hz. Dostępny zakres wartości to 0 – 599 Hz.
- Znamionowe napięcie silnika w parametrze 01-02. Domyślnie ustawiona jest wartość 200.0 V dla modeli 230V. Dostępny zakres wartości dla
tych modeli to: 0 – 255V. Dla modeli o innym napięciu, domyślna wartość jest adekwatnie wyższa.
5. Sterowanie skalarne U/F z klawiatury – parametr 00-11
Przemiennik częstotliwości będzie sterować napędem w trybie prędkościowym. Źródłem częstotliwości oraz komend START/STOP będzie wbudowana klawiatura. Parametry przemiennika częstotliwości są ustawione domyślnie w takim trybie pracy.
Parametry:
- Sterowanie U/F, parametr 00-11 ustawiamy na 0, domyślnie ustawione jest 0
czyli tryb skalarny - Źródło częstotliwości, parametr 00-20 ustawiamy na 0 czyli źródło z klawiatury, domyślnie ustawiona jest klawiatura
- Źródło komend ruchu, parametr 00-21 ustawiamy na 0 czyli klawiatura, domyślnie ustawiona jest klawiatura
Zmianę częstotliwości dokonujemy strzałkami góra/dół w momencie gdy na panelu wybrana jest wartość poprzedzona literą „F”. Falownik uruchamiamy przyciskami START/STOP.
6. Sterowanie wektorowe i autotuning silnika IM (indukcyjnego) – parametry: od 01-00 do 01-02 oraz od 05-00 do 05-04
W celu uruchomienia falownika w trybie wektorowym IMFOC, w pierwszej kolejności musimy wykonać autotuning silnika. Przed przystąpieniem do Autotuningu zalecamy przywrócić falownik do ustawień fabrycznych.
Do wykonania autotuning potrzebne są parametry silnika z tabliczki znamionowej.
Uzupełniamy parametry w falowniku:- Maksymalna częstotliwość zadana (domyślnie 50.00 Hz) w parametrze 01-00.
- Znamionowa częstotliwość silnika (domyślnie 50.00 Hz) w parametrze 01-01.
- Znamionowe napięcie silnika (domyślnie 220.0V) parametr 01-02.
- Znamionowy prąd silnika (jednostka: ampery) w parametrze 05-01.
- Znamionowa moc silnika w jednostce kW w parametrze 05-02.
- Znamionowa ilość biegunów silnika (nie pary biegunów) w parametrze 05-04.
- Znamionowa prędkość obrotowa silnika w obr/min w parametrze 05-03.
Po uzupełnianiu tych parametrów możemy wykonać autotuning silnika. Mamy dwie możliwości: autotuning statyczny czyli jeżeli silnik podłączony jest już do obciążenia lub autotuning dynamiczny czyli w sytuacji kiedy silnik nie jest podłączony do obciążenia i wałek może swobodnie się obracać
Wyboru trybu autotuningu dokonujemy w parametrze 05-00. Wpisujemy albo wartość 1 czyli autotuning dynamiczny lub wartość 2 czyli autotuning statyczny. Następnie uruchomiamy falownik komendą „RUN” i czekamy na zakończenie autotuningu. Po zakończeniu autotuningu należy zresetować zasilanie falownika i sprawdzić czy zostały wpisane wartości do parametrów od 05-06 do 05-09. Po sprawdzeniu możemy uruchomić tryb wektorowy (IMFOC) w parametrze 00-11 wpisując w nim wartość 5.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
Ostatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować podstawowe parametry falowników serii CP2000
1. Źródło częstotliwości zadanej – parametr 00-20
Za źródło częstotliwości zadanej odpowiada
parametr 00-20. Domyślnie wybrana jest klawiatura czyli wartość 0.Dostępne opcje do wyboru:
0. Klawiatura
1. Port szeregowy RS-485
2. Wejście analogowe
3. Zewnętrzne przyciski +/-
6. Karta komunikacyjna CANopen
8. Karta komunikacyjna inna niż CANopen
2. Źródło komend ruchu – parametr 00-21
Za źródło komend ruchu (start, stop, kierunek) odpowiada parametr 00-21. Domyślnie komendy zadawane są z klawiatury (wartość 0 ). Źródła do wyboru:0. Klawiatura.
1. Wejścia cyfrowe.
2. Port szeregowy RS-485.
3. Karta komunikacyjna CANopen
5. Karta komunikacyjna inna niż CANopen
3. Ramy przyspieszania oraz hamowania – parametry 01-12, 01-13
Za ustawienie czasów przyspieszania oraz hamowania odpowiadają kolejno parametry 01-12 oraz
01-13. Domyślnie obydwie wartości ustawione są na 10.00 sekund. Dostępny zakres wartości: 0 – 600 sekund, lub jeżeli ustawimy parametr
01-45 na 1, to wtedy maksymalny zakres wyniesie: 0 – 6000 sekund. Falowniki większej mocy mogą mieć ustawioną większą rampę niż 10.00 sekund.
4. Podstawowe parametry silnika – parametry 01-00, 01-01, 01-02
- Maksymalna częstotliwość zadana w parametrze 01-00. Domyślnie ustawiona jest wartość 50.00 Hz Dostępny jest zakres wartości 0-599 Hz. Dla modeli większych mocy lub równych 45 kW maksymalny zakres to 0 – 400 Hz.
- Znamionowa częstotliwość silnika w parametrze 01-01. Domyślnie ustawiona jest wartość 50.00 Hz. Dostępny zakres wartości to 0 – 599 Hz.
- Znamionowe napięcie silnika w parametrze 01-02. Domyślnie ustawiona jest wartość 200.0 V dla modeli / 230V. Dostępny zakres wartości dla
tych modeli to: 0 – 255V. Dla modeli o innych napięciach domyślna wartość będzie adekwatnie wyższa.
5. Sterowanie skalarne U/F z klawiatury – parametr 00-11
Przemiennik częstotliwości będzie sterować napędem w trybie prędkościowym. Źródłem częstotliwości oraz komend START/STOP będzie wbudowana klawiatura. Parametry przemiennika częstotliwości są ustawione domyślnie w takim trybie pracy.
Parametry:
- Sterowanie U/F, parametr 00-11 ustawiamy na 0, domyślnie ustawione jest 0
czyli tryb skalarny - Źródło częstotliwości, parametr 00-20 ustawiamy na 0 czyli źródło z klawiatury, domyślnie ustawiona jest klawiatura
- Źródło komend ruchu, parametr 00-21 ustawiamy na 0 czyli klawiatura, domyślnie ustawiona jest klawiatura
Zmianę częstotliwości dokonujemy strzałkami góra/dół w momencie gdy na panelu wybrana jest wartość poprzedzona literą „F”. Falownik uruchamiamy przyciskiem RUN.
6. Sterowanie wektorowe i autotuning silnika IM (indukcyjnego) ) – parametry: od 01-00 do 01-02 oraz od 05-00 do 05-04
W celu uruchomienia falownika w trybie wektorowym SVC, w pierwszej kolejności musimy wykonać autotuning silnika. Przed przystąpieniem do Autotuningu zalecamy przywrócić falownik do ustawień fabrycznych.
Do wykonania autotuning potrzebne są parametry silnika z tabliczki znamionowej.
Uzupełniamy parametry w falowniku:- Maksymalna częstotliwość zadana (domyślnie 50.00 Hz) w parametrze 01-00.
- Znamionowa częstotliwość silnika (domyślnie 50.00 Hz) w parametrze 01-01.
- Znamionowe napięcie silnika (domyślnie 220.0V) parametr 01-02.
- Znamionowy prąd silnika (jednostka: ampery) w parametrze 05-01.
- Znamionowa moc silnika w jednostce kW w parametrze 05-02.
- Znamionowa ilość biegunów silnika (nie pary biegunów) w parametrze 05-04.
- Znamionowa prędkość obrotowa silnika w obr/min w parametrze 05-03.
Po uzupełnianiu tych parametrów możemy wykonać autotuning silnika. Mamy dwie możliwości: autotuning statyczny czyli jeżeli silnik podłączony jest już do obciążenia lub autotuning dynamiczny czyli w sytuacji kiedy silnik nie jest podłączony do obciążenia i wałek może swobodnie się obracać
Wyboru trybu autotuningu dokonujemy w parametrze 05-00. Wpisujemy albo wartość 1 czyli autotuning dynamiczny lub wartość 2 czyli autotuning statyczny. Następnie uruchomiamy falownik komendą „RUN” i czekamy na zakończenie autotuningu. Po zakończeniu autotuningu należy zresetować zasilanie falownika i sprawdzić czy zostały wpisane wartości do parametrów od 05-06 do 05-09.
Po sprawdzeniu możemy uruchomić tryb wektorowy (SVC) w parametrze 00-11 wpisując w nim wartość 2.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
Ostatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować podstawowe parametry falowników serii MH300
1. Źródło częstotliwości zadanej – parametr 00-20
Za źródło częstotliwości zadanej odpowiada parametr 00-20. Domyślnie wybrana jest klawiatura czyli wartość 0.
Dostępne opcje do wyboru:
0. Klawiatura
1. Port szeregowy RS-485
2. Wejście analogowe
3. Zewnętrzne przyciski +/-
4. Wejście impulsowe bez komendy kierunku
5. Wejście impulsowe z komendą kierunku
6. Karta komunikacyjna CANopen
8. Karta komunikacyjna inna niż CANopen
9. Regulator PID ( przy załączonym parametrze 08-65 na 1)
2. Źródło komend ruchu – parametr 00-21
Za źródło komend ruchu (start, stop, kierunek) odpowiada parametr 00-21. Domyślnie komendy zadawane są z klawiatury (wartość 0 ). Źródła do wyboru:0. Klawiatura.
1. Wejścia cyfrowe.
2. Port szeregowy RS-485.
3. Karta komunikacyjna CANopen
5. Karta komunikacyjna inna niż CANopen
3. Ramy przyspieszania oraz hamowania – parametry 01-12, 01-13
Za ustawienie czasów przyspieszania oraz hamowania odpowiadają kolejno parametry 01-12 oraz
01-13. Domyślnie obydwie wartości ustawione są na 10.00 sekund. Dostępny zakres wartości: 0 – 600 sekund, lub jeżeli ustawimy parametr 01-45 na 1, to wtedy maksymalny zakres wyniesie: 0 – 6000 sekund. Falowniki większej mocy mogą mieć ustawioną większą rampę niż 10.00 sekund.
4. Podstawowe parametry silnika
- Maksymalna częstotliwość zadana w parametrze 01-00. Domyślnie ustawiona jest wartość 50.00 Hz Dostępny jest zakres wartości 0-599 Hz.
- Znamionowa częstotliwość silnika w parametrze 01-01. Domyślnie ustawiona jest wartość 50.00 Hz. Dostępny zakres wartości to 0 – 599 Hz.
- Znamionowe napięcie silnika w parametrze 01-02. Domyślnie ustawiona jest wartość 220.0 V dla modeli 115/230V.
5. Sterowanie skalarne U/F z klawiatury – parametr 00-11
Przemiennik częstotliwości będzie sterować napędem w trybie prędkościowym. Źródłem częstotliwości oraz komend START/STOP będzie wbudowana klawiatura. Parametry przemiennika częstotliwości są ustawione domyślnie w takim trybie pracy.
Parametry:
- Sterowanie U/F, parametr 00-11 ustawiamy na 0, domyślnie ustawione jest 0
czyli tryb skalarny - Źródło częstotliwości, parametr 00-20 ustawiamy na 0 czyli źródło z klawiatury, domyślnie ustawiona jest klawiatura
- Źródło komend ruchu, parametr 00-21 ustawiamy na 0 czyli klawiatura, domyślnie ustawiona jest klawiatura
Zmianę częstotliwości dokonujemy strzałkami góra/dół w momencie gdy na panelu wybrana jest wartość poprzedzona literą „F”. Falownik uruchamiamy przyciskiem RUN.
6. Sterowanie wektorowe i autotuning silnika IM (indukcyjnego) – parametry: od 01-00 do 01-02 oraz od 05-00 do 05-04
W celu uruchomienia falownika w trybie wektorowym IMFOC, w pierwszej kolejności musimy wykonać autotuning silnika. Przed przystąpieniem do Autotuningu zalecamy przywrócić falownik do ustawień fabrycznych.
Do wykonania autotuning potrzebne są parametry silnika z tabliczki znamionowej.
Uzupełniamy parametry w falowniku:- Maksymalna częstotliwość zadana (domyślnie 50.00 Hz) w parametrze 01-00.
- Znamionowa częstotliwość silnika (domyślnie 50.00 Hz) w parametrze 01-01.
- Znamionowe napięcie silnika (domyślnie 220.0V) parametr 01-02.
- Znamionowy prąd silnika (jednostka: ampery) w parametrze 05-01.
- Znamionowa moc silnika (w jednostce kW) w parametrze 05-02.
- Znamionowa ilość biegunów silnika (nie pary biegunów) w parametrze 05-04.
- Znamionowa prędkość obrotowa silnika (w obr/min) w parametrze 05-03.
Po uzupełnianiu tych parametrów możemy wykonać autotuning silnika. Mamy dwie możliwości: autotuning statyczny czyli jeżeli silnik podłączony jest już do obciążenia lub autotuning dynamiczny czyli w sytuacji kiedy silnik nie jest podłączony do obciążenia i wałek może swobodnie się obracać
Wyboru trybu autotuningu dokonujemy w parametrze 05-00. Wpisujemy albo wartość 1 czyli autotuning dynamiczny lub wartość 2 czyli autotuning statyczny. Następnie uruchomiamy falownik komendą „RUN” i czekamy na zakończenie autotuningu. Po zakończeniu autotuningu należy zresetować zasilanie falownika i sprawdzić czy zostały wpisane wartości do parametrów od 05-06 do 05-09.
Po sprawdzeniu możemy uruchomić tryb wektorowy (IMFOC) w parametrze 00-11 wpisując w nim wartość 5.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
Ostatnia aktualizacja: 14 stycznia 2025
- Jak skonfigurować podstawowe parametry falowników serii ME300?
1. Źródło częstotliwości zadanej – parametr 00-20
Za źródło częstotliwości zadanej odpowiada
parametr 00-20. Domyślnie wybrana jest klawiatura czyli wartość 0.Dostępne opcje do wyboru:
- Klawiatura
- Port szeregowy RS-485
- Wejście analogowe
- Zewnętrzne przyciski +/-
- Wejście impulsowe
- Potencjometr na panelu
- Regulator PID
2. Źródło komend ruchu – parametr 00-21
Za źródło komend ruchu (start, stop, kierunek) odpowiada parametr 00-21. Domyślnie komendy zadawane są z klawiatury. Źródła do wyboru:0. Klawiatura.
1. Wejścia cyfrowe.
2. Port szeregowy RS-485.
3. Rampy przyspieszania oraz hamowania – parametry 01-12, 01-13
Za ustawienie czasów przyspieszania oraz hamowania odpowiadają kolejno parametry 01-12 oraz
01-13. Domyślnie obydwie wartości ustawione są na 10.00 sekund. Dostępny zakres wartości: 0 – 600 sekund. Przy załączonym parametrze 01-45 na 1 dostępny jest zakres od 0 do 6000 sekund.
4. Podstawowe parametry silnika – parametry 01-00, 01-01, 01-02
- Maksymalna częstotliwość zadana w parametrze 01-00. Domyślnie ustawiona jest wartość 50.00 Hz Dostępny jest zakres wartości 0-599 Hz.
- Znamionowa częstotliwość silnika w parametrze 01-01. Domyślnie ustawiona jest wartość 50.00 Hz. Dostępny zakres wartości to 0 – 599 Hz.
- Znamionowe napięcie silnika w parametrze 01-02. Domyślnie ustawiona jest wartość 220.0 V dla modeli 115V/ 230V. Dostępny zakres wartości dla
tych modeli to: 0 – 255V
5. Sterowanie skalarne U/F z klawiatury – parametr 00-11
Przemiennik częstotliwości będzie sterować napędem w trybie prędkościowym. Źródłem częstotliwości oraz komend START/STOP będzie wbudowana klawiatura. Parametry przemiennika częstotliwości są ustawione domyślnie w takim trybie pracy.
Parametry:
- Sterowanie U/F, parametr 00-11 ustawiamy na 0, domyślnie ustawione jest 0
czyli tryb skalarny - Źródło częstotliwości, parametr 00-20 ustawiamy na 0 czyli źródło z klawiatury, domyślnie ustawiona jest klawiatura
- Źródło komend ruchu, parametr 00-21 ustawiamy na 0 czyli klawiatura, domyślnie ustawiona jest klawiatura
Zmianę częstotliwości dokonujemy strzałkami góra/dół w momencie gdy na panelu wyświetla się F. Falownik uruchamiamy przyciskiem RUN.
6. Sterowanie wektorowe i autotuning silnika IM (indukcyjnego) – parametry: od 01-00 do 01-02 oraz od 05-00 do 05-04
W celu uruchomienia falownika w trybie wektorowym SVC, w pierwszej kolejności musimy wykonać autotuning silnika. Przed przystąpieniem do Autotuningu zalecamy przywrócić falownik do ustawień fabrycznych.
Do wykonania autotuning potrzebne są parametry silnika z tabliczki znamionowej.
Uzupełniamy parametry w falowniku:- Maksymalna częstotliwość zadana (domyślnie 50.00 Hz) w parametrze 01-00.
- Znamionowa częstotliwość silnika (domyślnie 50.00 Hz) w parametrze 01-01.
- Znamionowe napięcie silnika (domyślnie 220.0V) parametr 01-02.
- Znamionowy prąd silnika w parametrze 05-01.
- Znamionowa moc silnika w jednostce kW w parametrze 05-02.
- Znamionowa ilość biegunów silnika (nie pary biegunów) w parametrze 05-04.
- Znamionowa prędkość obrotowa silnika w obr/min w parametrze 05-03.
Po uzupełnianiu tych parametrów możemy wykonać autotuning silnika. Mamy dwie możliwości: autotuning statyczny czyli jeżeli silnik podłączony jest już do obciążenia lub autotuning dynamiczny czyli w sytuacji kiedy silnik nie jest podłączony do obciążenia i wałek może swobodnie się obracać
Wyboru trybu autotuningu dokonujemy w parametrze 05-00. Wpisujemy albo wartość 1 czyli autotuning dynamiczny lub wartość 2 czyli autotuning statyczny. Następnie uruchomiamy falownik komendą „RUN” i czekamy na zakończenie autotuningu. Po zakończeniu autotuningu należy zresetować zasilanie falownika i sprawdzić czy zostały wpisane wartości do parametrów od 05-06 do 05-09.
Po sprawdzeniu możemy uruchomić tryb wektorowy (SVC) w parametrze 00-11 wpisując w nim wartość 2.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
Ostatnia aktualizacja: 14 stycznia 2025
- Czy istnieje instrukcja do sterowania osiami impulsowo dla sterownika DVP-SA2?
Dla sterowników serii slim z tranzystorowymi wyjściami można zrealizować sterowanie impulsowe instrukcjami DDRVI (dla pozycji inkrementalnych) oraz DDRVA (dla pozycji absolutnych). Pozwalają one wysłać określoną ilość impulsów (S1) z zadaną częstotliwością (S2) na jednej z zdefiniowanych grup wyjść. W przypadku sterownika SA2 są dostępne 2 grupy: CH0 (Y0,Y1) – gdzie wyjście Y0 odpowiada krokowi, a Y1 określa kierunek ruchu CH1 (Y2,Y3) – Y2 krok, Y3 kierunek.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 13 czerwca 2018
- Czy w PLC zabudowanym w C2000 można zmienić tryb pracy np. z sterowania prędkością na sterowanie pozycją?
Tryb pracy może być zmieniony za pomocą rejestru specjalnego D1060 ( 0 – sterowanie prędkością, 1- pozycją, 2- momentem, 3 – bazowanie).
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 5 lutego 2018
- Czy można załączyć pracę falownika za pomocą wejścia, a za pomocą komunikacji RS485 sterować częstotliwością i kierunkiem pracy falownika np. podając ujemną wartość częstotliwości?
Nie można zmienić kierunku pracy falownika podając ujemną wartość częstotliwości.
Aby sterować kierunkiem pracy falownika należy ustawić:
02.00 na 3 ( zadawanie prędkości po RS485)
02.01 na 1 ( źródło komend sterujących z wejścia cyfrowego)
04.04 na 1 ( wejście MI1 start/stop, MI2 FWD/REV)
wtedy wejście MI1 będzie wejściem pracy napędu, a wejście MI2 wejściem kierunku.Aby sterować kierunkiem po komunikacji należy ustawić parametr:
04.27 na 2 – w tym parametrze ustawiamy, że MI2 (tylko to wejście, reszta pozostaje bez zmian) nie będzie zewnętrznym wejściem tylko wewnętrznym (INTERNAL)Następnie stanem wejścia MI2 będziemy sterować poprzez wpisywanie (po komunikacji) odpowiedniej wartości do rejestru 04.28
0 – FWD
2 – REV
W sterowniku powinno to wyglądać następująco:
16#041c – parametr 04.28 (szesnastkowo: 04 —> 04; 28—-> 1C)
D600 — odpowiednia wartość (jeśli 0 ruch FWD zaś jeżeli 2 ruch REV)Dzięki temu wejściem MI1 (start/stop) możemy sterować elektrycznie, zaś wejściem MI2 (fwd/rev) przez komunikację.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 30 lipca 2018
- Czy można ograniczyć moment serwonapędu w trybie zadawania pozycji/prędkości?
Aby mieć możliwość włączenia ograniczenia momentu, należy ustawić parametr P1-02 na 10, spowoduje to włączenie funkcji ograniczenia momentu.
Do ustawienia limitów momentu służą parametry P1-12 do P1-14, należy wpisać do nich odpowiednie wartości.
Możemy zapamiętać trzy ustawienia ograniczenia momentu. Aby wybrać sposób kontroli ograniczenia momentu (TQ1~3 lub analog) należy odpowiednio ustawić wejścia TCM1 oraz TCM0. Odpowiednia konfiguracja tych wejść pozwala na ustawienie danego trybu.
Należy ustawić funkcje odpowiednich wejść na TCM0 (wartość 0x16) oraz TCM1 (wartość 0x17) parametrami P2-10 do P2-17 (w zależności od wybranego wejścia).
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 30 lipca 2018
- Czy w serwonapędach serii B2 istnieje możliwość ustawienia bazowania na moment wyjściowy silnika?
W serii B2 nie ma możliwości ustawienia takiego trybu bazowania. Funkcja ta jest dostępna jedynie w serwonapędach serii A2.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 18 czerwca 2018
- Czy przy sterowaniu analogowym serwonapędu można ustawić próg napięcia potrzebnego do startu silnika?
Można, poprzez załączenie specjalnego wejścia oraz ustawiając limit prędkości.
Należy ustawić na dowolnym z wejść funkcję: 5 (ZCLAMP) i aktywować ją elektrycznie bądź zmieniając polaryzację wejścia. Należy również ustawić parametr 1-38 na prędkość poniżej, której napęd ma nie wykonywać ruchu. Jednostka dla P1-38 to 0.1 obr/min.Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 13 czerwca 2018
- Czy w serwonapędzie B2 można sterować prędkością i zmieniać jej wartość za pomocą 2 wejść cyfrowych?
Tak, w tym celu należy ustawić tryb pracy P1-01 na Sz (Zero Speed/Internal Speed Command. Na wejściach cyfrowych należy ustawić funkcję SPD0 i SPD1. Z zależności załączonych wejść serwo napęd będzie jechać z prędkością zdefiniowaną w P-09, P1-10, P1-11.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 13 czerwca 2018
- W jaki sposób odczytać aktualną pozycję serwonapędu serii A2 podłączonego po CAN ze sterownikiem DVP10MC?
Należy użyć funkcji MC_ReadActualPosition, a następnie przekazać ją do rejestru odczytywanego w PLC.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 13 czerwca 2018
- W jaki sposób można ustawić offset wejścia analogowego serwa B2?
W serwonapędach serii B2 można ustawić offset w parametrze P4-22 w mV.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 12 czerwca 2018
- Jak ustawić czas przyspieszania i hamowania serwonapędu B2 przy sterowaniu impulsowym z PLC?
Dla kanału 0 (Y0, Y1) czasy przyspieszania i hamowania określa rejestr D1343. Jeżeli jest załączona flaga M1534 jest załączona to czas hamowania określa rejestr D1348.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 15 stycznia 2018
- Ile wynoszą temperatury pracy serwowzmacniacza i silnika serwo?
Dla serwowzmacniacza zalecana temperatura pracy to 0-50 stopni Celsjusza, a dla silnika zakres ten wynosi 0-40 stopni.
UWAGA: w przypadku przekroczenia temperatury pracy silnika powyżej 85 stopni otrzymujemy ostrzeżenie – AL.067, natomiast powyżej 105 stopni pojawi się alarm – AL.035.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 15 stycznia 2018
- Ile wynosi maksymalna wartość przeciążenia w serwonapędach Delta? Czy można ją regulować?
Maksymalne przeciążenie serwonapędu wynosi 300% i nie jest regulowane (zaprogramowane na sztywno, dopuszczalny zakres przeciążenia można regulować np. włączając ograniczenie momentu – parametry P1-02 oraz P1-12).
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 15 stycznia 2018
- Czy można sterować serwonapędem ASD B2 poprzez Modbus?
Serwonapędy serii B2 nie mają możliwości bezpośredniego sterowania przez Modbus – nie jest możliwe zadawanie drogi przejazdu i prędkości poprzez komunikację – taką funkcjonalność mają napędy A2.
Seria B2 umożliwia natomiast zapis i odczyt wszystkich parametrów sterujących – w przypadku sterowników Delta można wtedy wykorzystać instrukcje MODRW. Adresy modbusowe poszczególnych parametrów podane są przy każdym z nich w instrukcji serwonapędu w rozdziale ze szczegółowymi opisami parametrów.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 15 stycznia 2018
- Jak ustawić wartość zadaną dla regulatora PID w falownikach VFD-E/EL?
Istnieje kilka możliwości rozwiązania tego zagadnienia:
1. Można użyć parametru P10.11, w którym definiujemy częstotliwość zadaną falownika wyrażoną od 0 do częstotliwości maksymalnej falownika (P01.00). Przykładowo dla maksymalnej częstotliwości falownika wynoszącej 50 Hz, po ustawieniu 25 Hz w P10.11, regulator będzie starał się osiągnąć wartość zwrotną dla 0-10 V na poziomie 5 V.
Aby aktywować tę funkcję należy wpisać wartość 4 do P10.11.2. Można zastosować dwa wejścia analogowe które są zabudowane w falowniku VFD-E.
Jedno z wejść analogowych będzie w takim wypadku sygnałem sprzężenia zwrotnego P10.01.
Drugie wejście analogowe będzie wtedy źródłem sygnału zadanego do regulatora PID. Wartość sygnału można zadawać z PLC bądź potencjometru.
Aby aktywować tę funkcję należy wpisać wartość 2 lub 3 do P10.00.UWAGA: W falownikach serii E są dostępne 2 wejścia analogowe AVI (0-10 V) i ACI (4-20 mA/0-10 V). Należy pamiętać o przełączeniu mikro przełącznika na odpowiedni typ wejścia ACI sygnału przed załączeniem zasilania.
3. Wartość zadaną można również wysyłać poprzez komunikację modbus.
W tym celu należy ustawić parametr 10.00 na 1, a parametr 2.00 na 3 (Komunikacja po RS485).
Adres Modbusowy częstotliwości zadanej to 2001H. Jego wartość wpisywana jest jako całkowita z dokładnością 2 miejsc po przecinku. Na przykład dla wartości 30Hz, w rejestr należy wpisać wartość 3000.Sposób doboru wartości jest taki sam jak dla parametru P10.11 – patrz punkt 1.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3Ostatnia aktualizacja: 9 stycznia 2018
- Do czego służy plik EDS?
Plik EDS jest plikiem konfiguracyjnym dla oprogramowania tworzącego i ustawiającego sieć CANOpen. Wszelkie ustawienia sieci – sposób i wymieniane parametry, odbywają się po stronie mastera. Urządzenia slave muszą mieć jedynie ustawione odpowiednie parametry komunikacji zgodne z masterem sieci.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 12 czerwca 2016
- W jaki sposób można ustawić parametry falownika?
Parametry falownika można ustawiać za pomocą wbudowanego panelu lub poprzez komunikację. W zależności od serii i modelu można korzystać z protokołu Modbus ASCII/RTU, Modbus TCP, Profibus DP, DeviceNet, Ethernet/IP, CANOpen. Do wgrania początkowych parametrów falownika najlepiej użyć oprogramowania VFDSoft i konwertera RS-485. W ofercie InduProgress jest dostępny konwerter USB/RS-485 o oznaczeniu IFD6500.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 6 grudnia 2017
- Czy rezystor hamujący ogranicza maksymalną prędkość silnika?
Rezystor hamujący nie ogranicza prędkości maksymalnej silnika, natomiast może ograniczać maksymalną liczbę zatrzymań/startów w ciągu minuty.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 6 grudnia 2017
- Czy istnieje znacznik, który informuje, że instrukcja pozycjonowania DZRN/DDRVI/DDRVA wykonała się poprawnie?
Zakończenie wykonywania instrukcji pozycjonowania sygnalizowane jest flagą M1029.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 30 października 2017
- W jaki sposób wprowadzić serwonapęd w tryb ruchów ręcznych JOG?
Za pomocą parametru 4-05 należy ustawić prędkość obrotową. Wówczas ruch silnika jest wymuszany za pomocą przycisków strzałek. Serwowzmacniacz nie może wskazywać alarmu i musi mieć załączony sygnał Servo On, aby wykonać ruch.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 30 października 2017
- W jaki sposób sterować czasem przyspieszania i zwalniania w trybie pozycyjnym?
W trybie pozycyjnym PT (zadawanie impulsowe) czas przyspieszania i zwalniania może być kontrolowany wyłącznie przez sterownik generujący impulsy.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 30 października 2017
- W jaki sposób sterować czasem przyspieszania i zwalniania w trybie prędkościowym?
W trybie prędkościowym za czas przyspieszania i zwalniania odpowiadają parametry P1-34, P1-35, P1-36.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 23 października 2017
- Czy jest jakiś parametr, który pozwoliłby szybciej wygenerować błąd przeciążenia w sytuacji awaryjnej gdy dojdzie do zablokowania serwa? W przypadku sterowania w trybie momentowym oczywiście możemy ograniczyć zadany moment, ale czy istnieje jakiś sposób, żeby zabezpieczyć się przed uszkodzeniem mechanicznym przy zablokowaniu serwa w trybie impulsowym?
W trybie impulsowym również istnieje możliwość ograniczenia momentu – parametry P1-02 oraz P1-12 oraz wejścia cyfrowe.
Można ustawić jedno z wyjść cyfrowych napędu na funkcję 0x10 – OLW, następnie ustawić w parametrze P1-56 dopuszczalny czas przeciążenia na niską wartość (kilka procent). W takim przypadku, po wystąpieniu przeciążenia wystawiony zostanie sygnał ostrzeżenia na jednym z wyjść cyfrowych.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 16 października 2017
- Czy jest dostępny programator do falowników, aby można było zgrywać i archiwizować parametry?
Falowniki mogą być programowane z wykorzystaniem panelu. Istnieje możliwość przenoszenia parametrów z jednego falownika na drugi z wykorzystaniem demontowanego panelu. W zależności od serii może to być panel PU06 lub KPC-CC01.
Do programowania falowników może być również wykorzystane oprogramowanie VFDSoft, które można pobrać ze strony internetowej InduProgress. Do połączenia komputera z falownikiem jest wymagany konwerter RS485. W naszej ofercie dostępny jest konwerter USB<>RS-485 o oznaczeniu IFD6500.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 9 października 2017
- Jak obliczyć poziom wykrywania przeciążenia momentowego dla falownika?
Poziom wykrycia przeciążenia momentowego dla falownika obliczamy z wzoru:
aktualny prąd wyjściowy / prąd znamionowy falownika.Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 2 października 2017
- W momencie szukania pozycji Home, kontroler CNC wykonuje ruch serwonapędem w kierunku dodatnim, podczas gdy parametry są ustawione do ruchu w przeciwnym
Standardowa operacja szukania pozycji Home wygląda następująco:
krok 1: ruch w ustawionym kierunku w celu znalezienia czujnika Home
krok 2: ruch w stronę przeciwną z mniejszą prędkością w celu zjechania z czujnika Home
krok 3: ruch w stronę przeciwną do najbliższego sygnału ZUwaga: Gdy w momencie wystąpienia rozkazu szukania pozycji Home, sygnał Home jest aktywny, kontroler CNC wykona jedynie kroki 2 i 3.
1. Dlaczego silnik nie porusza się w kierunku ujemnym podczas powrotu do pozycji Home?
Wynika to z błędnego ustawienia ON/OFF sygnału Home, powodując sytuację, kiedy kontroler uważa, że napotkał sygnał Home i porusza się w kierunku dodatnim aby znaleźć sygnał Z.
2. Dlaczego silnik nie wykonuje ruchu w kierunku dodatnim w celu znalezienia punktu Z?
Powyższy problem również wynika z błędnego ustawienia ON/OFF dla sygnału Home. Gdy ustawienia są nieprawidłowe wprowadza to w błąd użytkowników, którzy sądzą, że kontroler wykonał kroki 1 i 2, a pominął krok 3, podczas gdy kontroler pominął krok 1 i wykonał kroki 2 oraz 3.
Aby rozwiązać powyższe problemy należy wprowadzić prawidłowe ustawienia sygnału Home, poprzez ‘Machine Parameter- Zero Point’
Ustawienia sygnałów Home znajdują się w M2146 dla osi X, w m2150 dla osi Y i w M2154 dla osi Z.Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 28 sierpnia 2017
- Dlaczego funkcja interpolacji 2 osi lepiej działa w sterownikach serwonapędów serii ASD-M niż w połączonych ASD-A2?
Gdy jeden z serwonapędów ASDA-A2 będzie miał opóźnienie w wykonywaniu ruchu, informacja o dokładnym położeniu oraz instrukcja korygująca do drugiego napędu będą musiały przejść przez zewnętrzny kontroler. W ASDA-M interpolacja odbywa się w tym CPU co wykonywanie ruchów więc taki układ nie będzie miał opóźnień związanych z czasem trwania komunikacji z innymi urządzeniami.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 21 czerwca 2017
- Jakie są ograniczenia do odległości komunikacji dla Delta DMCNet?
Zależnie od typu przewodów komunikacyjnych, Delta DMCNet wspiera komunikacje na odległość do 30 m.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Jaki typ przewodów powinienem użyć do sieci DMCNet?
Dla prawidłowego działania komunikacji DMCNet zalecane jest użycie przynajmniej skrętki kat. 5 (Cat-5e STP).
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Jaka jest różnica pomiędzy terminatorami do sieci CANopen i DMCNET?
Terminatory do sieci DMCNET posiadają 2 rezystory dopasowujące na każdym z końców magistrali, pomiędzy pinami 7 i 8 oraz 3 i 6.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Czy seria HMI DOP może komunikować się bezpośrednio z falownikami Delta Electronics?
Wszystkie panele i falowniki Delty obsługują protokół MODBUS. Najłatwiej skonfigurować taką komunikację wybierając w panelu sterownik Delta Controller ASCII/RTU.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Które sterowniki serwonapędów obsługują serwonapędy z enkoderem absolutnym?
Obecnie tylko serie ASDA-A2, ASDA-M i ASDA-M-R obsługują enkodery absolutne. Serie ASDA-AB oraz ASDA-B2 nie obsługują tego typu enkoderów.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- W jakim celu w falownikach zamontowana jest zworka filtra RFI?
Napęd AC może emitować zakłócenia RFI. Zworka filtru RFI pozwala na ograniczenie zakłóceń przewodowych RFI, generowanych do linii zasilania sieciowego. Jeśli napęd zasilany jest z izolowanej sieci zasilającej (IT), zworka filtru RFI powinna być usunięta. Usunięcie zworki odłącza kondensatory RFI (filtrujące) od uziemienia i tym samym zabezpiecza obwody napędu AC przed uszkodzeniem, oraz redukuje prąd upływu doziemnego.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Czy istnieją ograniczenia temperatury otoczenia i temperatury pracy napędów AC?
Tak, dozwolony zakres temperatury otoczenia i pracy napędu AC jest określony w instrukcji. Zakres temperatur może się różnić w zależności od serii i mocy napędu.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Jak ograniczyć zakłócenia elektromagnetyczne w systemach z serwonapędami?
W celu ograniczenia zakłóceń elektromagnetycznych w systemach z serwonapędami należy rozważyć poniższe zagadnienia:
- rozdzielenie zasilania serwonapędów i pozostałych urządzeń;
- zastosowanie ekranowanej skrętki w przypadku kabli komunikacyjnych;
- zastosowanie rdzeni ferrytowych dla kabli mocy RST, UVW i kabli komunikacyjnych;
- poprowadzenie niezależnych przewodów uziemiających dla wszystkich urządzeń.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Jak ustawić falownik C2000 żeby startował automatycznie po resecie jeżeli ma sygnał na FWD/REV?
Aby falownik ze źródłem komendy Run ustawionym na zacisk wejść cyfrowych wystartował po resecie automatycznie należy ustawić parametr 02-35 na 1.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Dlaczego po wyłączeniu zasilania muszę czekać, aż dioda sygnalizacyjna w falowniku całkowicie zgaśnie przed rozpoczęciem podłączania lub odłączania przewodów?
W czasie pracy falownika kondensatory wewnątrz falownika są naładowane do wysokiego napięcia (około 320 V dla zasilania 230 V, oraz 600 V dla zasilania 400 V). Takie napięcie może pojawić się na zaciskach wyjściowych falownika nawet gdy jest odłączony od zasilania. Aby uniknąć porażenia prądem elektrycznym należy poczekać aż kondensatory rozładują się do bezpiecznego poziomu.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 19 czerwca 2017
- Jak interpretować aktualną prędkość silnika w falowniku C2000?
W otwartej pętli sterowania aktualna prędkość silnika jest wyliczana ze wzoru n=120f/P, gdzie f – częstotliwość, P – liczba pól silnika. W zamkniętej pętli sterowania prędkość silnika odczytywania jest poprzez kartę enkoderową falownika na podstawie impulsów z enkodera, co w rezultacie daje znacznie bardziej precyzyjną wartość porównując do pętli otwartej.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Jak przełączyć źródło zadanej częstotliwości pomiędzy AVI I ACI w falowniku C2000?
Aby przełączać źródło zadanej częstotliwości pomiędzy AVI i ACI należy: ustawić źródło zadanej częstotliwości jako sygnał analogowy Pr. 00-20=2; ustawić funkcję wejścia AVI jako komendy częstotliwości Pr. 03-00=1; ustawić funkcję wejścia ACI jako komendy częstotliwości Pr. 03-01=1; ustawić wejście cyfrowe falownika np. MI1 jako przełącznik na tryb ACI Pr. 02-01=16. Dla wyłączonego MI1 otrzymamy źródło częstotliwości z AVI, dla załączonego MI1 źródłem tym będzie ACI.
Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.plOstatnia aktualizacja: 20 czerwca 2017
- Jak zabezpieczyć pamięć EEPROM w serwonapędach serii A2, B2 oraz B3?
Aby umożliwić zabezpieczenie pamięci EEPROM należy ustawić parametr P2.030 na 5. Nastawa ta pozwala na wyłączenie zapisu do pamięci EEPROM. W ten sposób wszystkie parametry nie będą podtrzymywane. Pozwala to na zabezpieczenie pamięci przed zużyciem. Jest to niezbędne w przypadku zapisu parametrów po komunikacji.
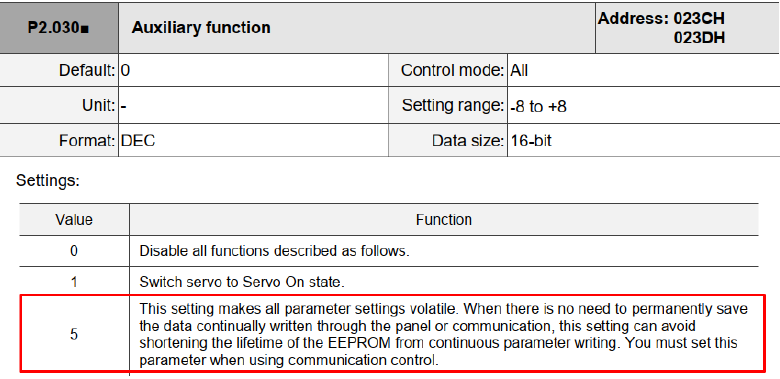
- Jak ustawić automatyczny reset błędów od zbyt niskiego napięcia w falownikach serii: MS300, ME300, MH300, CP2000, C2000, C2000+, CFP2000, CH2000?
Ustawienie automatycznego resetu błędów od zbyt niskiego napięcia we wszystkich wymienionych seriach falowników jest możliwe w parametrze: Pr.06-49. Należy ustawić ten parametr na 1 (Lvx Auto-Reset: 0 – Disable, 1 – Enable).
06-49 Lvx Auto-Reset 0: Disable 1: Enable 0 Odpowiedzi udzielił Dział Wsparcia Technicznego
telefon: +48 22 290 31 78 wew.3
pomoc@induprogress.pl
